

Improving FLL Robot Game. Teacher's Note. Calculating gear rotations
What should you do as a teacher when the students are calculating the gear ratios and number of needed rotations?
- #470
- 07 Apr 2017
What should you do as a teacher when the students are calculating the gear ratios and number of needed rotations?

Next state in our state machine programming pattern is the "Turn Left" state and the corresponding behaviour.

Building instructions for a LEGO Mindstorms EV3 Motorcycle, but this time with helper wheels. The helper wheels solve the problem of making turns with the robot. If the robot loses balance it will fall. The goal of the helper wheels is to make it easier for the robot to turn. Small modification, but really make a difference.

This is a LEGO Mindstorms Boxing robot. The inspiration story goes like this "One day we though - Let's play SUMO at this robotics demonstration, but let's make it more interesting. Let's play sumo with Humanoid Robots". We decided to build a boxing robot. The goal of the robot is to press the touch sensor on the other robot and it could be very fun. Perfect robot for demonstration. It is controlled by a joystick using the Bluetooth connection.
Here are the joystick and the programs for the joystick and the robots.
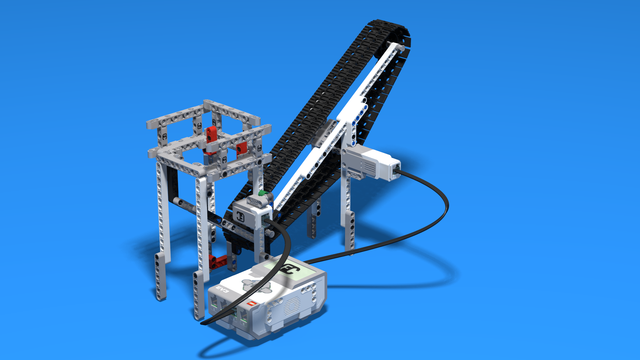
Whitiki comes from Maori and means Belt.
The robot uses a medium motor to run the belt and a color sensor to identify the color of the ball coming in. There are 56 chain pieces in the robot.

Susan comes from Sue, which is the name of the largest fully preserved specimen of T-Rexes.
Mark comes from Marc Bolan, who is the lead singer/gutarist of the band T-Rex.
The robot is made to resemble a T-Rex (Susan) chasing a car (Mark).
The T-Rex uses a Large motor to go forward and backward. The other Large motor is used for the car, which resembles a very simple 4-wheel vechicle. Susan's task is to spot Mark using the current power option of the motor rotation sensor. As T-Rexes can not notice you if you are moving very slow, Mark is trying his best to move really slow so that he doesn't get spotted!

In case of natural disaster, fire or other emergency one of the first precautions is to turn off the power supply.
The robot should turn off the power supply in the house by flipping the black lever 180 degrees from its original position. In the beginning of the run the team has the ability to select the position of the switch.
The power suply is turned off from position 1 - 10 points.

The power suply is turned off from position 2 - 20 points.

The power suply is turned off from position 3 - 30 points.

Scoring Requirements

This program is a final version of the game played with EV3 Kinesthetic and Memory Game. In this game you are given a sequence of hints which you are expected to remember and to perform the right actions in the given order.

With this program we accomplish the Innovation project mission from FIRST LEGO League 2020. We use the LEGO Mindstorms Robot Inventor as a set. The program is written in Python