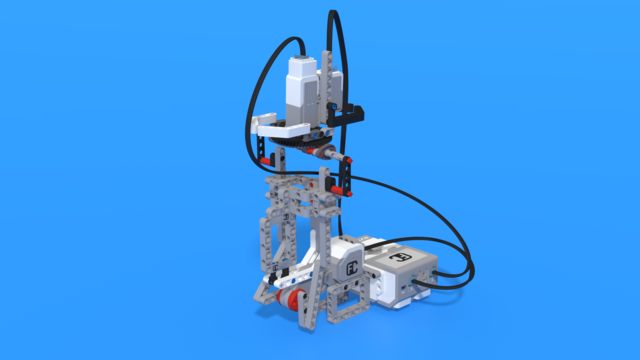
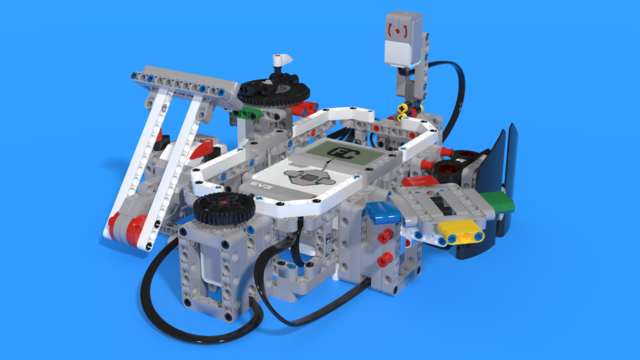
This robot is a veriation of the Spark Bot without steering wheel.
The goal of this LEGO Mindstorms building instruction is to spark the imagination when the base of the construction is very simple. Just two motors with the brick above them and one of the most classic ways to attach them together - with angled beams.
The construction could use EV3 or NXT wheels, so chose wisely. As a robot chassis base, it is suitable for all kinds of extensions. An interesting thing is the motors are attached to each other with a frame which is getting very popular in the EV3 world.