Discuss with students the ways to change the construction of the robot, so that it doesn't tumble after a sudden change in speed. Let the students give suggestions and repeat the good ones out loud so that everyone hears them.
Stay open-minded to original solutions. In the beginning, we knew of three solutions, then our own students came up with two more, resulting in five solutions so far. Here they are:
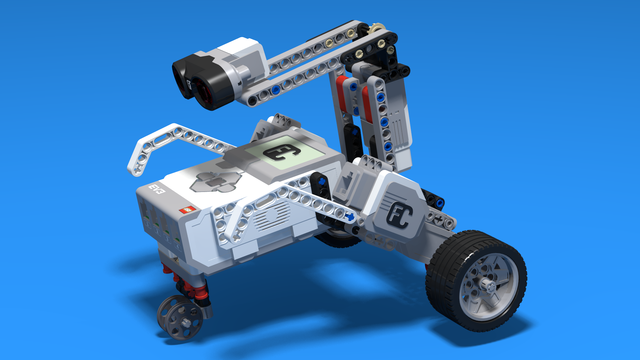
How to balance a robot
- Move the brick backward. That is the fastest solution to implement. If you have time in the class let the students choose how to modify their robot;
- Use smaller tires, so that the robot goes slower and the inertia effects are not so strong. The drawback of this solution is that the robot has slower movement speed;
- Add counterweight to the rear of the robot. The drawback of that solution is that the robot becomes bigger and possibly slower;
- Add support under the brick, like a crutch. When you add another support wheel, the robot will not tumble;
- Make the current support wheel taller, so that the projection of the center of mass is in between the three wheels of the robot;
- There is another constructive change that is available, that we cannot remember while we were writing this tutorial ;-)
Attention: Do not change the support wheel behind the robot, because students must build on top of it when they attach sensor for the additional tasks.