Showing the same run, but from a different angle. This allows you to see more of the way we sensors work and how exactly the robot positions itself.
- #192
- 27 Dec 2015
- 1:36
- LEGO MINDSTORMS, LEGO MINDSTORMS EV3
- World Robot Olympiad, EV3-G, EV3, WRO, Gyro Sensor, Sensors, Programming
What is very interesting is that this robot does make mistakes, but finds it way back and accomplishes the tasks. The Gyro sensor detects the turn and the robot reacts on how much it has turned.
A whole playlist for WRO 2015 Elementary is available at:
World Robotics Olympiad 2015 Elementary

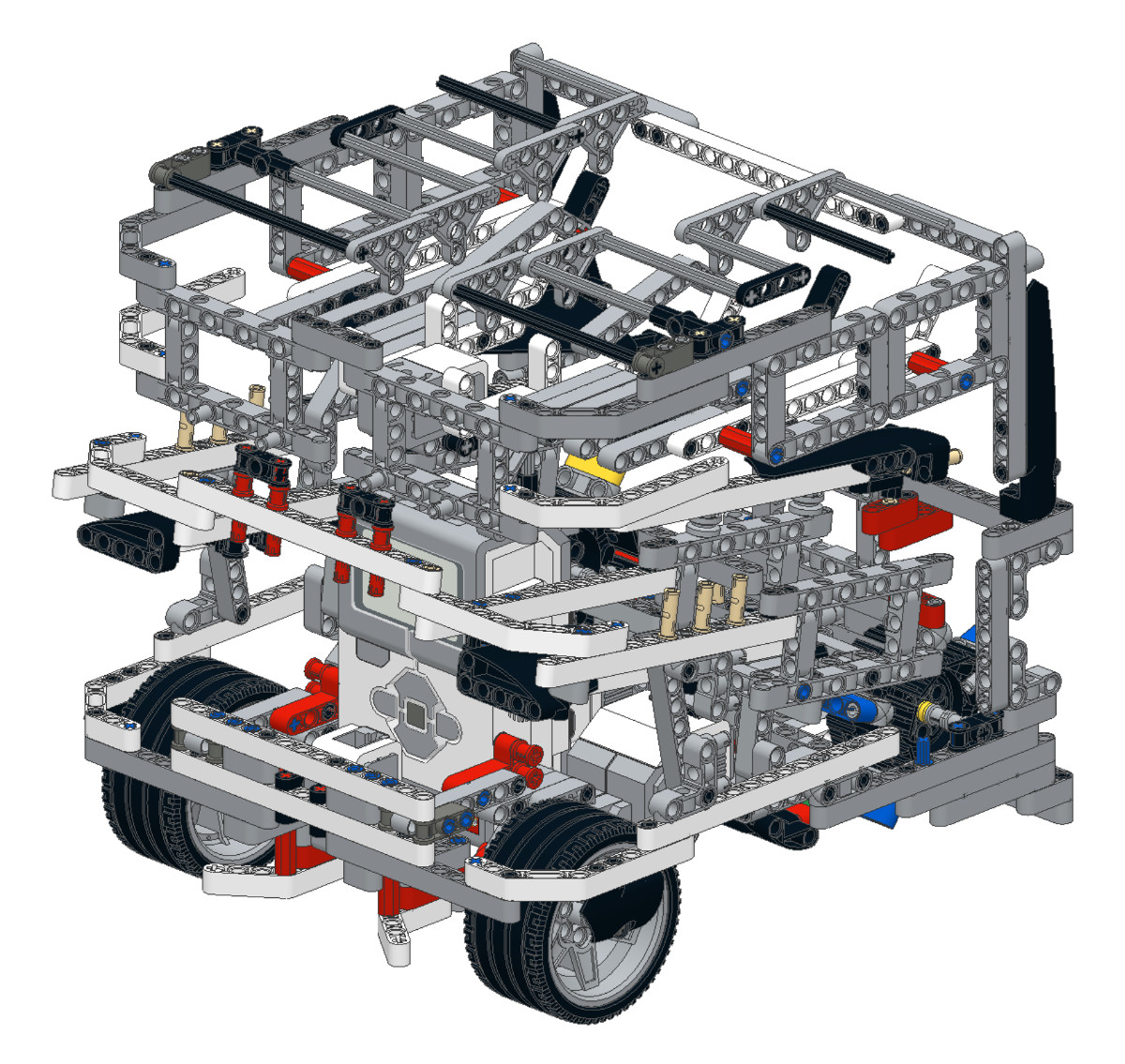
Here is how the robot looks at the end:
Block for accurate turning on 90 degrees with the Gyro Sensor
This block accurately turns the robot to a specific angle. One of the most useful blocks that you could use during competitions. The block makes the robot turn and when the robot makes an error, the block will correct for this error.
Finally, you can be sure that the robot has turned to the specific angle that you want.
You have three inputs
- Turning angle - the angle that you would like the robot to turn.
- Power - the power that you would like the motors to have
- Correction power - the power during the correction phase.
VERY IMPORTANT: This is a block for EV3-G. You download and import this block from Project Settings->Blocks->Import. If you are using Internet Explorer or Microsoft Edge and you click to download the file it will try to save it as "zip". DO NOT SAVE IT AS ZIP. Save it as "ev3s" or just PLEASE, STOP using Internet Explorer or Microsoft Edge. This will dramatically improve your browsing experience.

![]()
English
In this video I would like to show you different angle of the World Robotics Olympiad (WRO) 2015 solutions.
Now this will be the same program as previously only it is from a different angle.
The robot's facing north, towards us,
then we align, if we make a mistake, we can compensate for this mistake as you saw and we move back to the red region. We must release 6 balls.
One more run for the yellow region.
It is basically the same program. Move, dive, detect the color of the first pearl, then dive again for the second pearl.
Make a mistake, now we compensate for the mistake,
return to the yellow region, rotate the robot and release a number of balls.
Courses and lessons with this Tutorial
This Tutorial is used in the following courses and lessons

World Robotics Olympiad (WRO) 2015 Elementary. Review of solutions with explanations
You must dive. You must count. You must release. Well, not exactly you, but the robot. In this playlist we present an example solution to the WRO 2015 challenge along with some nice constructions for releasing balls while counting them with a robot. That sounds pretty easy, but could get quite challenging when the number of balls is large.
- 5
- 23:43
- 0

Field Run. Part 2
Showing the same run, but from a different angle. This allows you to see more of the way we sensors work and how exactly the robot positions itself.
- 1
- 0
- 0
- 3d_rotation 0