It is a simple problem with simple solutions. You have the back wheel and you must somehow transfer some torque to this back wheel. You can use a chain, or gears or a shaft. Oh, we do like the motors that have shafts.

To access the full video please subscribe to FLLCasts.com
- #734
- 19 Feb 2018
- LEGO MINDSTORMS, LEGO MINDSTORMS EV3
- Gears, Vehicle, Motorcycle, Learn At Home, EV3, Motorcycle, Gears, Vehicle, Basic, Construction
Cardan shaft
My first real motorcycle had one of those. It was a Yamaha Virago 535 and it was a great motorcycle. The shaft is sometimes also called the "cardan shaft" and is just a rod attached on one and to the motor and on the other end to the wheel. Of course, there are a couple of gear wheels involved and it is also possible to have a number of rods, but at the end, the principle is the same.
Would this robot move faster or move slower.
Fast and slow is only relative to the previous robot in the course. What you should do is try to construct the robot and inspect the shaft that is transferring torque to the back wheel. See how it works. Before even starting the robot try to guess if this robot will move faster than the previous.
What is the question?
Again the question is about balance, Is the robot falling on one side? When? Can you turn with the robot without the robot falling to its side? How to make the robot turn?
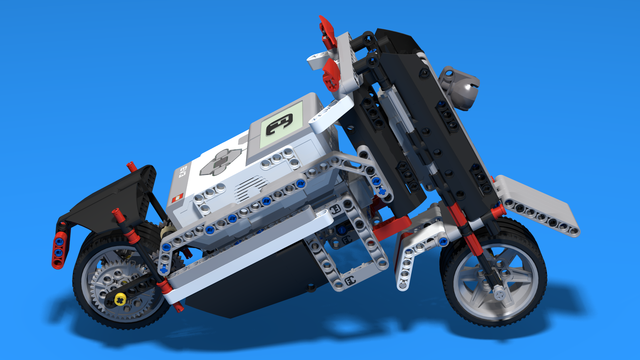
Ninja - Sports Motorcycle built with LEGO Mindstorms EV3
It's fast. It's on two wheels. It's a motorcycle. And this one is built from LEGO Mindstorms EV3 sets with the use of one additional Medium Motor. If you have two medium motors, great. If you don't have you can build the Handlebar - Chopper Motorcycle built with LEGO Mindstorms EV3, because it uses one large and one medium motor that are available in any EV3 set.
Currently, the motorcycle has no sensors. It's more of an exercise in construction, but if you attach sensors and think of a way to attach them send us a picture.
Join the course A robot a "day" keeps the questions awake where we will further discuss the motors, how to build them and what tasks to accomplish with them.
You can also download the program from here.

![]()
Courses and lessons with this Tutorial
This Tutorial is used in the following courses and lessons

A robot a "day" keeps the questions awake. Version 1
"How to use the LEGO robots to facilitate the learning of robotics by my student at home" or simply put - "what to build now?"
After enrolling in this course we will send you a few (1-2-3) emails each month with a title "A robot a 'day'". Each email contains a robot building instructions and/or video tutorials and/or tasks that should be accomplished. After a task is accomplished we might sometimes ask for a video or picture.
This process gives a structure of the learning process where you can learn from the content. The student participates in a course, but from home and on the schedule that you decide.
- 26
- 98:39
- 47
Sport Motorcycle. Drive with a "cardan shaft" (shhwhat?)
This video tutorial shows how the LEGO Mindstorms EV3 Ninja Motorcycle robot works. It's a nice demonstration with the robot moving forward, backward, and slightly to the left and right.
- 2
- 0
- 3
- 3d_rotation 2