LEGO Education SPIKE Prime

FIRST LEGO League (FLL) 2019-2020 City Shaper Challenge. Example solutions with explanations. EV3 and SPIKE
You probably know that every year we're releasing a Solutions and Review course for the missions of FIRST LEGO League competitions challenges. This year the situation with the competition is a bit different, but here we are - sitting here, acting kinda normal, figuring out what robot should we build to accomplish every mission 10 times in a row.
- 23
- 6:58
- 20


FLL 2021: Deliver a model - How to accomplish Innovation Project Model
In this video tutorial we deliver the Innovation project model from base to the cargo connect marker on the field. The goal of the mission is to deliver. The mission model is assembled before that.
- #2035
- 16 Sep 2022

FLL 2021: Deliver large objects - 10 out of 10 on how to accomplish the Large Delivery mission
This is a 10 out of 10 tutorial on an active, auto-correcting, locking, and aligning attachment that accomplishes the FIRST LEGO League 2021-2022 Cargo Connect Large Delivery mission. The difference, as compared to the previous solution to the mission, is that we now use a much more consistent and reliable robot.
- #2120
- 04 Apr 2023

Преминаване през известен тунел
Една от обичайните задачи по роботика е преминаване през лабиринт.
Тук ще ви запознаем с подготвителна задача за лабиринта - преминаване през тунел с известен ред на завоите.
- #627
- 20 Aug 2017
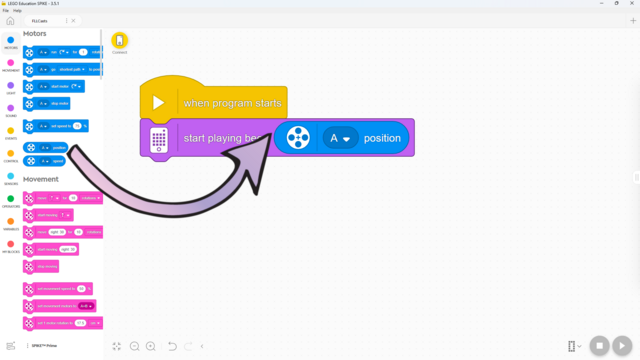
Как да използваме блокчето за позиция на мотора в LEGO SPIKE Prime Word Blocks софтуер
Знаете ли, че можете да използвате моторите като сензори? Ето как!
- #2494
- 16 Sep 2025

Мален - LEGO SPIKE Prime робот за развален телефон
Мален произлиза от Малентенду, което на френски означава недоразумение.
Роботът има цветно колело с 4 цвята отзад и сензор за цвят отпред. Когато покажете цвят на цветния сензор, робота може да го покаже обратно. Можете да свържете няколко такива робота, за да направите развален телефон!
- #4244
- 23 Feb 2026

Teacher's Notes
Solutions to today’s tasks:
Program the robot to lift its arm by 90 degrees in 1 second.
from hub import port import runloop import motor, time async def main(): # write your code here # Start motor motor.run(port.D, 90) # Wait for 2 seconds time.sleep_ms(1000) # Stop motor motor.stop(port.D) runloop.run(main())
Program the robot to lift its arm by 90 degrees in 2 seconds.
from hub import port import runloop import motor, time async def main(): # write your code here # Start motor motor.run(port.D, 45) # Wait for 2 seconds time.sleep_ms(2000) # Stop motor motor.stop(port.D) runloop.run(main())
Program your robot to hand you its cup using the "run_for_time()" command.
from hub import port import runloop import motor async def main(): # write your code here await motor.run_for_time(port.D, 2000, 45) runloop.run(main())
from hub import port import time import runloop import motor async def main(): # write your code here motor.run(port.A, 1000) motor.run(port.B, -1000) time.sleep_ms(2000) motor.stop(port.A) motor.stop(port.B) await motor.run_for_time(port.D, 1000, 90) runloop.run(main())
- #2585
- 06 Feb 2026