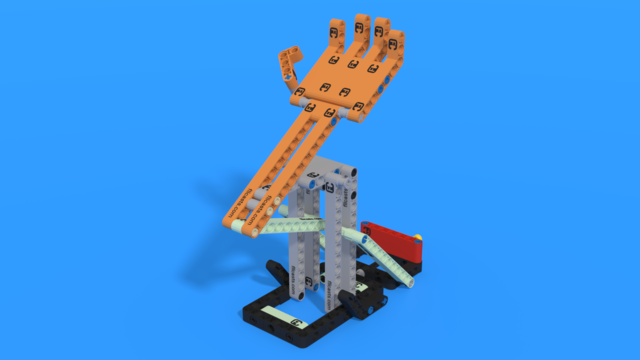
FLL 2022: Push and collect Kriket Box Robot attachment to accomplish the M07, M08, M15
This is an attachment for the Kriket Box robot that accomplishes multiple missions. The missions are connected with Push and Collect actions and are from the FIRST LEGO League 2022-2023 SUPER POWERED competition. The attachment is a little different than the recording because we improved it a little after that
- #1687
- 24 Oct 2023