След като сте построили няколко робота може да научите как се строят роботи супер-бързо. Това не се получава чрез бързане.
Трикът е в постоянно заредена поточна линия. Така ще можете да строите големи и интересни роботи за малко време.
След като сте построили няколко робота може да научите как се строят роботи супер-бързо. Това не се получава чрез бързане.
Трикът е в постоянно заредена поточна линия. Така ще можете да строите големи и интересни роботи за малко време.

Както може да видите от описанието по-горе, има много моменти, в които всеки от двамата чака другия. Как можем да намалим това време?
Така се получава бърза поточна линия и можете да изпреварите хора, които не използват този метод с поне 15 стъпки в края на робота.
Обикновено не се състезаваме в строенето и не трябва да се състезаваме. Даваме ви този пример за да разберете, колко по-бърз е този метод на строене. Така ще можете да строите големи и интересни роботи за малко време.
Този Урок е използван в следните курсове и занятия.

Първото ниво от учебната програма по LEGO роботика за ученици от пети до дванадесети клас.
В нивото се изграждат различни конструкции на роботи. Управляват се моторите така, че роботите да извършват прецизни завои около „земята“ и „луната“. Преодоляваме различни препятствия след като се блъснем в тях благодарение на сензора за допир.
С помощта на сензора за разстояние роботът се движи без да се блъска в заобикалящите го препятствия. Достигаме до понятията цикъл, градуси, среден мотор. Накрая роботите могат да изпълняват едновременно две различни неща - докато изпълняват мисии върху специално изградено поле, третият двигател разчиства засечени обекти.

В края на следващото занятие обикновено правим завършване. Напишете впечатленията си за учениците и причините защо сте дали ранга, който сте им поставили.
Първото ниво от учебната програма по LEGO роботика за ученици от пети до дванадесети клас.
В нивото се изграждат различни конструкции на роботи. Управляват се моторите така, че роботите да извършват прецизни завои около „земята“ и „луната“. Преодоляваме различни препятствия след като се блъснем в тях благодарение на сензора за допир.
С помощта на сензора за разстояние роботът се движи без да се блъска в заобикалящите го препятствия. Достигаме до понятията цикъл, градуси, среден мотор. Накрая роботите могат да изпълняват едновременно две различни неща - докато изпълняват мисии върху специално изградено поле, третият двигател разчиства засечени обекти.
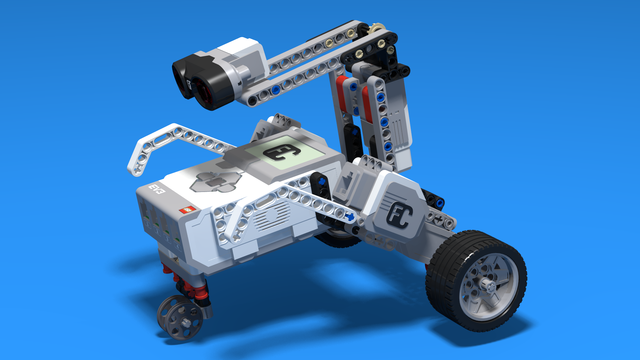
Днес ще строим робот, който ще снима далечната страна на луната.
Някой от вас виждал ли е далечната страна на луната? Къде?

Второто ниво на Роботика с LEGO предназначено за ученици от втори, трети или четвърти клас.
Въвежда се нов сензор - за разстояние, който с помощта на ултразвук позволява на робот-прилеп да се движи без да се блъска в заобикалящите го препятствия. Работи се с новите понятия: цикъл, градуси, среден мотор. Роботите вече изпълняват едновременно две различни неща - докато изпълняват мисии върху специално изградено поле, третият двигател разчиства засечени обекти. Конструира се една от първите верижни машини.

Днес ще построим първия ни робот за автоматизиран транспот и чрез него ще научим ново блокче - инструкция за повторение.

Четвъртото ниво от учебната програма по Роботика с LEGO за ученици от втори, трети и четвърти клас.
Учениците строят множество роботи с вериги. Въвежда се сензорът за светлина, който роботите използват, за да разпознават цветовете на обектите около тях. Запознават се с възможностите на зъбните колела, тяхната употреба и основни конструкции включващи зъбни колела. Роботите могат да спират на черна линия и да следват маршрут отбелязан с цветна линия на пода.

През това ниво ще разгледаме различни военни конструкции.
Виждали ли сте как по филмите, хора с ярко светещи палки сигнализират на кацащите самолети?
Знаете ли какво представляват тези сигнали?
Благодарение на тези сигнали, хората в тежки превозни средства, на които им трябва време за да се спрат, могат да навигират в натоварен трафик без инциденти. Днес ще започнем с камион за снаряжения, който ще е снабден със сензор за цвят. Ще се запознаем с този нов сензор, как работи той и как да го програмираме. След което ще го използваме, за да задаваме различни команди на камиона.


Четвъртото ниво от учебната програма по LEGO роботика за ученици от пети до дванадесети клас.
В това ниво учениците се фокусират на работа със сензора за завъртане, който се намира във всеки един двигател от комплекта. Освен това се запознават с работата на четвъртия сензор в комплекта по роботика - жироскопичният сензор.
Първите роботи имитират морски животни и техните поведения. Създават се програми, които засичат дали животните успешно са хванали нещо в щипките или човките си. Сензорът в двигателите позволява на роботите да се връщат успешно назад в леговищата си дори и след използване на неограничено движение. Изграждат се и роботи-лодки, яхти и платноходи. С помощта на жиро-сензора учениците насочват роботите по курс по определен ъгъл и засичат отклонения от курса. В открито море може и да има и морски чудовища и корабите им са програмирани да засичат рязка промяна в ускорението, с помощта на същия сензор.

Ще ви покажем как да се редувате така, че да има разбирателство по време на строенето.
Четвъртото ниво от учебната програма по Роботика с LEGO за ученици от втори, трети и четвърти клас.
Учениците строят множество роботи с вериги. Въвежда се сензорът за светлина, който роботите използват, за да разпознават цветовете на обектите около тях. Запознават се с възможностите на зъбните колела, тяхната употреба и основни конструкции включващи зъбни колела. Роботите могат да спират на черна линия и да следват маршрут отбелязан с цветна линия на пода.
Важно е да даваме обратна връзка за учениците си. Стараем се да го правим редовно по време на курса. По-долу следва описание какви рангове пишем училището по роботика и кои аспекти от поведението на учениците ги определят.
Днес трябва да поставите рангове на учениците си според инструкциите тук.
Ниво 4.0 е седма част от курса по “Роботика с лего” предназначена за ученици от 5-ти, 6-ти и 7ми клас.
В това ниво учениците разработват игра за трениране на паметта, като трябва да запомнят поредица от действия като натискане, разклащане, преместване на ръчка, показване на определен цвят. За да програмират успешно играта, започват да използват множество променливи и да манипулират съдържанието им. Създават собствени звуци и картинки за да предадат личен почерк в играта. В края на нивото играта може да запомня най-добрият резултат, дори след излючване на устройството с помощта на текстови файлове.
Ще ви покажем как да се редувате така, че да има разбирателство по време на строенето.
Осмото ниво от учебната програма по LEGO роботика за ученици от пети до дванадесети клас.
С помощта на роботи създадени за игри между учениците се упражнява работа с променливи. Роботите пазят натрупаните точки от играчите и правят пресмятания с информацията в променливите. Постоянно се използват познатите вече собствени блокове за групиране на функционалност. Въвежда се понятието поведение и програмите на роботите са организирани в множество нишки, които си обменят информация. В края на нивото роботите генерират задачи с числа, чрез които учениците трябва да съставят уравнение.
Ще ви покажем как да се редувате така, че да има разбирателство по време на строенето.

Ниво 3.0 е пета част от курса по “Роботика с лего”, предназначена за роботика за ученици от пети до дванадесети клас.
В това ниво започваме да въвеждаме работа с данните, измерени от сензорите. Въвежда се понятието алгоритъм и в програмите се правят изчисления без предварително да са известни стойностите, с които се пресмята. Програмните блокчета си обменят информация с помощта на жичките за данни. Роботите разглеждат проблемите на охраната и сигурността, изграждат се различни алармени системи и се разглеждат физическите принципи на различните методи за охрана.
Ще ви покажем как да се редувате така, че да има разбирателство по време на строенето.
Третото ниво по Роботика с LEGO за ученици от втори, трети и четвърти клас.
В занятията се набляга на по-сложни и предизвикателни роботи. Въвежда се новата конструкция за „условие“. Учениците се запознават с физическите понятия: инерция и център на тежестта. Изграждат се роботи с два сензора и едновременно се работи с тях. Роботите започват да стават по-умни като могат самостоятелно да вземат сложни решения. „Шпионски“ роботи преследват своите цели, като се предпазват да не бъдат забелязани.

В края на следващото занятие обикновено правим завършване. Напишете впечатленията си за учениците и причините защо сте дали ранга, който сте им поставили.

Във второто ниво по Python за EV3 роботи учениците изучават в дълбочина сензора за допир. Сензорът се разглежда както като средство за ръчно управление на машини, така и като сензор за автономни роботи. В няколко занятия учениците изграждат пулт за управление на хващача и движението на кран. От страна на програмирането учениците изучават конструкциите за разклоняване на код "if-else", условните и безкрайни цикли с "while" и операторът за обръщане на условие "not". В края на нивото роботите могат да усещат препятствия които да избягват и излизат от простичък лабиринт.
Ще ви покажем как да се редувате така, че да има разбирателство по време на строенето.
В много от занятията отборите работят върху един робот, като всеки отбор е отговорен за правилното реализиране на поетата от тях функционалност. Задълбочено се разглеждат задаването на входни стойности и използването на изходните стойности на всички блокове. Широко се използват променливи от трите основни типа: Numeric, Boolean, Text. Роботите вече пазят богато вътрешно състояние, могат да броят, да изчисляват, да се обосновават логически, с помощта на което взимат много по-правилни решения.
Въвежда се използването на паралелно изпълняващи се блокове.

Целта на занятието е да се реализират програми за робота BallHunter по-сложни от тези реализирани в Роботика Фи. Продължава се с използването на променливи, групиране на действията в блокове. Въвежда се прочитането на стойности от блокове. Въвеждане на блокове, които връщат резултат.
Сини и червени топки от няколко комплекта. Поне 5 топки общо.
