
How to play football with LEGO Mindstorms Robots. Introduction
Football with robots could be quite fun. Football with LEGO Mindstorms robots is one of the popular categories for competitions with LEGO Mindstorms Robots.
- #945
- 20 Sep 2018
"I came to browse the Internet and build robots. And I am done browsing the Internet". Many different approaches, principles and directions to constructing robots with detailed building instructions and pictures.
Football with robots could be quite fun. Football with LEGO Mindstorms robots is one of the popular categories for competitions with LEGO Mindstorms Robots.


As we are already off the season we decided to look back at the competition. First, we will take a look at the working solution for FIRST LEGO League 2017 Manhole Cover. This was generally accepted as one of the most difficult missions during the competition. We've built a single attachment to accomplish it.
(we are releasing the video without explanations and will add the explanations later)
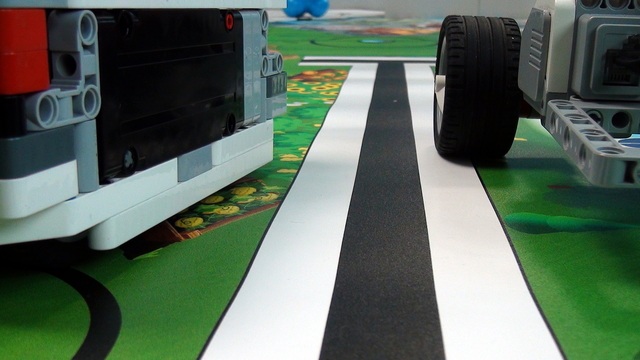
Should the robot be with a Front Wheel Drive or a Rear Wheel Drive to make it more precise? The answer is - front wheel will probably give you better results, but the wheel drive is not the most important thing. In this video tutorial on the LEGO Mindstorms Robots, we will do a few experiments to discuss the influence of the wheel drive on the precision of the movement.

You could use the LEGO Steel Balls as a third wheel on the robot. It is a caster wheel. But this is steel and as we know from basic existence on this planet, where there is steel there is also rust. The steel ball could get quite rusty and this could have an influence on the behaviour of the robot

DIfferent wheels and tires will result in different behaviour of the robot. That is actually pretty common sense. The real question is what is the influence. Would the robot make smaller deviations if it has smaller wheels or it will make larger deviations? The tires could also be quite dirty or brand new. Or the wheels could be attached in different ways.

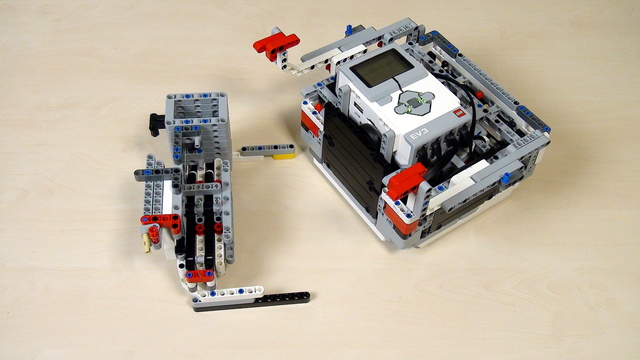
The balance of the construction of the robot has a great influence on how it will move. This is especially true if you would like to move in a straight line. If the robot is slightly heavier on the right it will move to the right. Here we have two robots - a Five Minute robot and a Box Robot and we will discuss the differences in the constructions and why the box robot is much better than the Five Minute even though it is using the same parts.

Building a rack is a very important skill during competitions. You should try to build one, learn how to use it and have it as a tool for you next robots. But for this particular BoxRobot, we will not continue with a rack.

Using the rack depends on the experience of the team. Based on this a different number of gear wheels and racks would be used.

Build a rack and try to lift the robot with this rack.
The next step of lifting a robot to a mission model is to try to use a rack.

Think of an attachment that leaves the Gecko on the mission model. Don't use the robot attachment that we already have. Just the box robot and the gecko. Nothing should support the Gecko when it is hanged on the mission model.

In this tutorial, we add another mission to our current program. This mission is - hanging the Gecko from the FIRST LEGO League Animal Allies.

What should you as a teacher know when the students are trying to achieve a program and robot attachment that could reproduce their behaviour 9 out of 10 times.

The task in this tutorial is to execute the program 10 times and to do it yourself. If you have your attachment then use it. If you have our attachment then use it. But execute the program 10 times and make sure that it works.

How great is the great attachment for lifting that we built in this course? How many times can it lift the robot without making an error? How great are your attachments and how could you test them? - the answer is simple. Just try 10 times and they should work at least 9 of them as our attachment is.

If you've done the calculation following the previous tutorials you would arrive at a result of 18.75 rotations. But this is not the correct answer. The calculation is wrong, because the math model that we've built, although kind of obvious, is not correct. When experimenting the correct number of rotations would be 37.5. This is a large difference. Two times larger. Exactly two times large. Something should be happening here - and this thing is "planetary mechanism"

This is a teacher's note about the math behind calculating gear ratios with for our lifting attachment. It math model we build in previous tutorials is not exactly correct and here is the explanation why.

Connect the attachment to the box robot and find the correct number of rotations of the middle motor that would bring the robot up and forward and would attach it to the mission model.

Sometimes the answer that you get by calculating seems not to be right. Is it the calculation that is wrong. Probably it is not the calculation, but something is happening with the robot.

In the previous video, we found the correct answer for our task and it is 18.75, or is it?

What should you do as a teacher when the students are calculating the gear ratios and number of needed rotations?

Calculate the number of rotations you have to do with the motor to rotate the final small 8 teeth driving gear wheel to 1.25 rotations?

We calculate the number of rotatios when a gear system is involved. The driving wheel will have to do a number of rotations for the driven wheel to rotate to a desired number of degrees. In our specific case when the driven gear wheel is rotate to about 90 degrees the legs will lift the robot.

Let us do a quick recap of the whole lifting mission and its solution

Note for the teacher on making the construction more stable, more durable and using beams for this.

