

ЛЕГО Съединител
Съединителят е механично устройство, което предава или не предава въртеливо движение. Днес ще видим как можем да конструираме такъв елемент, като използваме ЛЕГО.
- #908
- 30 Jul 2018
Every teacher/instructor can conduct classes with students using these resources. You need to motivate and organize the students. We provide the technical theory, tasks, instructions, programs and everything needed.
Съединителят е механично устройство, което предава или не предава въртеливо движение. Днес ще видим как можем да конструираме такъв елемент, като използваме ЛЕГО.

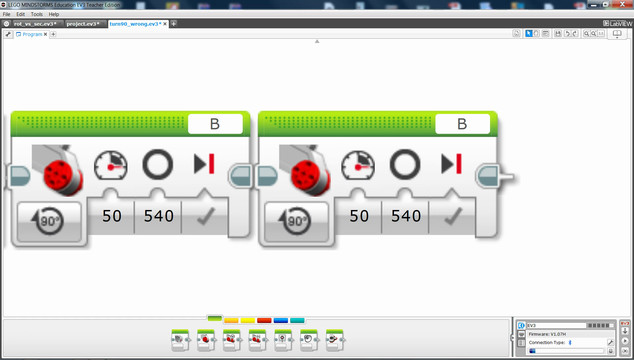
90-градусовото завъртане на робота е различно от 90-градусовото завъртане на мотора!

Опитайте сами да поставите сензор за допир на робота.

Сензорът за разстояние работи на принципа на изпращане на ултразвукови вълни към обект. Едното "око" е предавател и изпраща ултразвукови вълни, които се отразяват в обекта и се връщат в другото "око" - приемник.

Завоят на място е завой около центъра на робота. Да видим как се програмира.

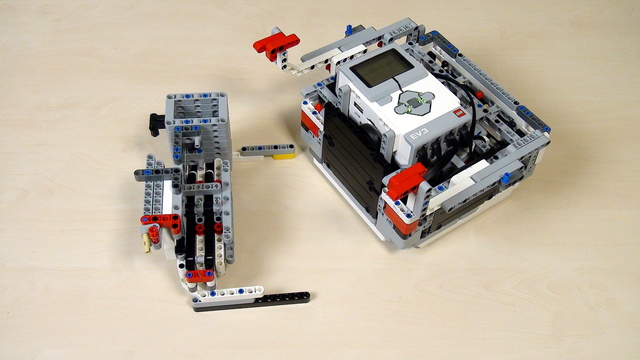
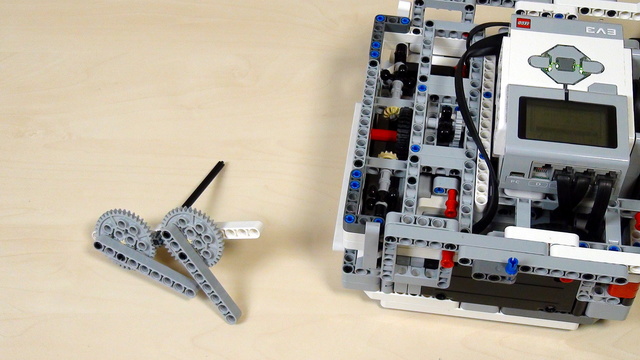
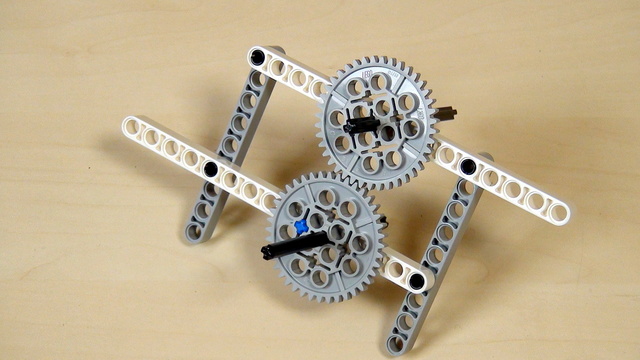
Робота Икозейтър е конструиран с идеята да може лесно да се променя зъбната му предавка. На видеото може да наблюдавате един начин за смяна на предавката му, като се извади гредата и се разменят зъбните колела на мотора и верижното колело. За предавки с различен размер зъбни колела се иска промяна в дължината на веригата или броя зъбни колела.
Как да потърсим и намерим неизвестна стойност с възможно най-малко опити.
The next step of lifting a robot to a mission model is to try to use a rack.

We've already build a number of resources for lifting at FLLCasts.com. But at the end of this course we would have a robot that lifts itself and hangs on the mission model.

Нещата, които очакваме от вас в занятие са следните:
Учениците задават въпросите;
Учениците ще сбъркат, преди да успеят;
Учениците работят в екип;
Когато Учителят говори, това е важно за всички;
Урокът се чете преди да дойдем на занятие.

Как да сменим посоката на греда от хоризонтална във вертикална.

Как да бъдете сигурни, че изображението на дисплея ще се вижда, когато програмата приключи.

Как да накараме робота да изчаква, докато програмата все още върви.

The final way for lifting our box robot is by using a scissors mechanism. In this Episode, we would discuss the benefits and advantages of this mechanism.

Ще построим лесния робот EasyBot и ще ви обясним как да следвате инструкции.

In this tutorial, we would drive the scissors mechanism and there are a number of rules that we must follow

Ще ви покажем най-точния и надежден начин за завиване с робот.

Има няколко основни правила, които според нас е добре да спазвате, докато подготвяте този курс. Нека ги разгледаме.

Don't limit yourself to the box and think of different ways to lift the robot.
Time to lift the robot. The first approach is by using the 40 teeth gear wheels that come with the LEGO Mindstorms EV3 and NXT robotics sets.

How should an instructor use this course when working with students and a group of students in school

Where should you lift the robot? Especially if you don`t have the mission model that we are using

Note for the teacher on how to organize the class to use different robot base constructions to accomplish the mission for lifting.
One of the very common problems with the LEGO Mindstorms and LEGO Technic Gear wheels is then a tooth is skipped. In this video, I would like us to discuss this challenge and how do we solve it.

Днес ще ви запознаем с имената и употребата на частите в един стандартен робот.
Важно: Различаваме и разделяме частите по форма не по цвят.

How to organize the different robots and group of students when working on lifting the robot.

Ще ви покажем какви са типичните проблеми, които правят учениците, когато строят робот.