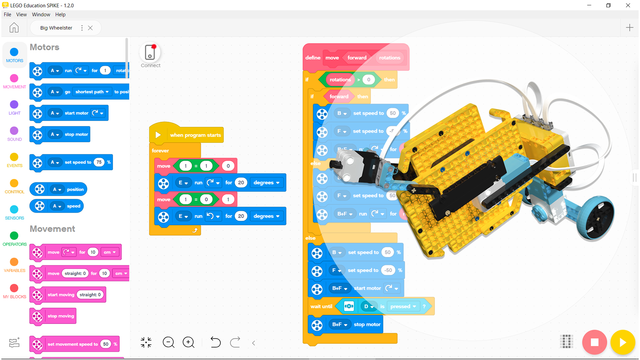
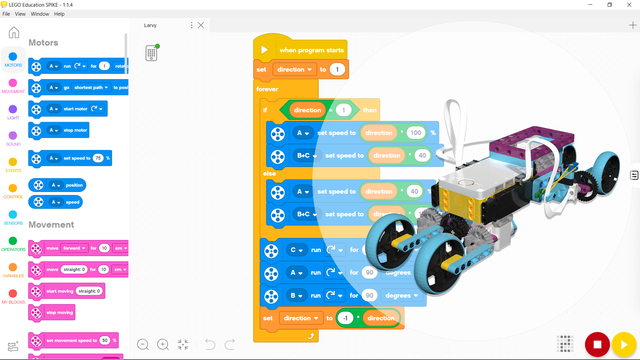
Program that makes Motorka move in an 8 shape
This program makes Motorka - LEGO SPIKE Prime motorbike robot move in the form of an 8 (or infinity sign:))! It uses the other program for the robot as a base, but instead of letting the steering free, this program controls it so that the robot moves in a shape!
- #ygum28
- 11 Aug 2020