As you have experience building robots it is time to learn how to build robot super-fast. This is not done by hurring up and skipping important steps.
The trick is to simulate an assembly line. A constantly loaded one.
As you have experience building robots it is time to learn how to build robot super-fast. This is not done by hurring up and skipping important steps.
The trick is to simulate an assembly line. A constantly loaded one.

As you can see from the description there are a lot of moments, in which both the builder and the partner are waiting. How can we reduce this time?
In this way, by simulating and assembly line you can build the robot before all the other students with at least 15 steps heads up.
We usually do not compete when assembling and we should not. We are giving this example for you to understand how much faster this approach is.
This Tutorial is used in the following courses and lessons

The first level of the Robotics with LEGO curriculum for students in fifth to twelfth grades.
Various constructions with robots are built. Learn how to control the motors so that the robot navigates around the Moon and Earth in various ways. Getting to know the first two sensors. The robot can feel its surroundings with the help of the Touch sensor and avoid obstacles.
The Ultrasonic distance sensor can help the robot avoid obstacles. Students work with concepts like loop, degrees and medium motor. Robots can now do two different actions at the same time - while solving missions on a field, the third motor clears detected obstacles.

In the next lesson we usually do a graduation. Write down your impressions about the students and the reasons why they have the grades you gave them.
The first level of the Robotics with LEGO curriculum for students in fifth to twelfth grades.
Various constructions with robots are built. Learn how to control the motors so that the robot navigates around the Moon and Earth in various ways. Getting to know the first two sensors. The robot can feel its surroundings with the help of the Touch sensor and avoid obstacles.
The Ultrasonic distance sensor can help the robot avoid obstacles. Students work with concepts like loop, degrees and medium motor. Robots can now do two different actions at the same time - while solving missions on a field, the third motor clears detected obstacles.

The second level of the Robotics with LEGO curriculum for students in second, third or fourth grades.
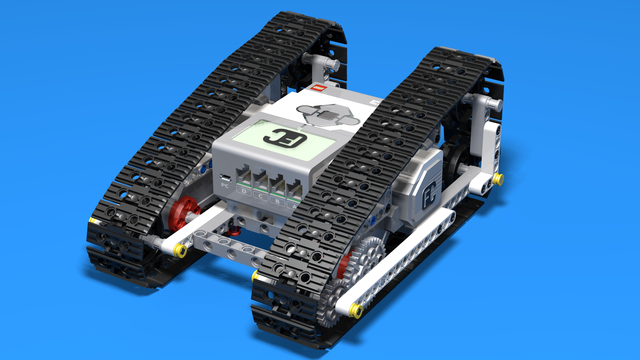
A new sensor is introduced - the Ultrasonic distance sensor can help the robot avoid obstacles. Students work with new concepts like loop, degrees and medium motor. Robots can now do two different actions at the same time - while solving missions on a field, the third motor clears detected obstacles. The first robot with chain-treads is built.

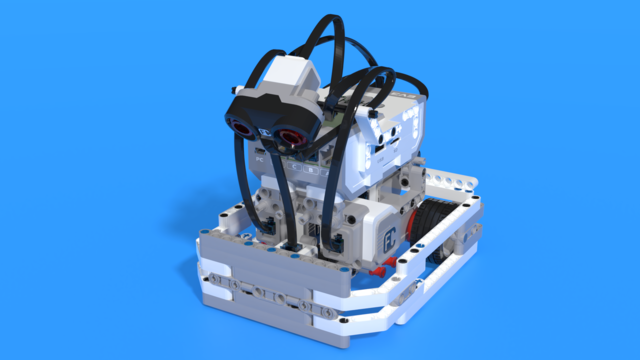
Today we will build our first robot for automated transportation which will help us learn a new block – the repetition instruction.

The firfth level of the Robotics with LEGO curriculum for students in second, third or fourth grades.
The students build many robots with chain-treads. The Color Sensor is introduced and robots use it to recognize the colors of the objects around them. Students learn about gears, basic gear constructions, and their application. Robots now can stop on a black line and can follow a line using their sensor.

In this course, we will construct different military vehicles and constructions.
Have you seen, probably in movies, how people use small light sticks to help airplanes land. These sticks are use to help drivers of heavy vehicles navigate in traffic without accidents.
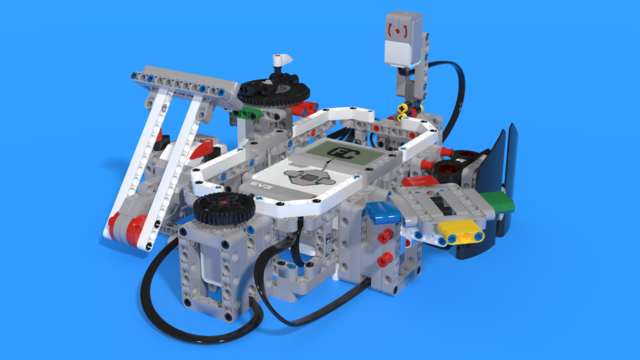
In today's' lesson we will build an Ammo Truck. We will attach to it a new sensor - color sensor. We will learn more about it, how it works and how to program it. Later, we will use it to give different commands to the truck.


The fourth level of the Robotics with LEGO curriculum for students from fifth to twelfth grades.
In this level students focus on the rotational sensor that is part of every motor in the robotics set. Students also learn to use the fourth sensor in the robotics set - the gyro sensor.
First few robot constructions imitate sea-animals and their behavior. Students create programs that check whether the robot's claws or pecks have successfully caught an object. That sensor in the motors allows the robots to go back in their lairs even after the use of unlimited movement. The rest of the robots are modeled after boats, yachts, and ships. With the help of the gyro sensor, students can set a course for their robots to a given angle and can detect deviations from the course. In open seas, there may be sea-monsters and the robots are being programmed to detect a sudden change in acceleration with the help of the said sensor.

Most probably you have not built a robot before. So not only you will build a robot for the first time, you will also have to work with another student. In order to make those first steps as smooth and pleasant as possible, we will point out some key things in the process of constructing a robot in pairs.
The firfth level of the Robotics with LEGO curriculum for students in second, third or fourth grades.
The students build many robots with chain-treads. The Color Sensor is introduced and robots use it to recognize the colors of the objects around them. Students learn about gears, basic gear constructions, and their application. Robots now can stop on a black line and can follow a line using their sensor.
Returning feedback to students is important. We try to return feedback constantly in the classes. You should also try to return feedback in a structured way - in a form of a digit. Today you will have to grade your students following this article.
The seventh level of the Robotics with LEGO curriculum for students in sixth or seventh grade.
In this level, student develop a memory training game. The player must remember series of actions like press a button, shake a pole, pull a lever, show one of many colors. In order to program the game, students use many variables and modify their states. Students create their own custom sounds and images, in order to reflect their own personality in the game. In the end of the level, the game stores top scores even after a full shut down with the help of text files.
Most probably you have not built a robot before. So not only you will build a robot for the first time, you will also have to work with another student. In order to make those first steps as smooth and pleasant as possible, we will point out some key things in the process of constructing a robot in pairs.
This is the eighth level of the Robotics with LEGO curriculum for students in fifth to twelfth grades.
With the help of robots designed for games between students, they learn how to work with variables. Robots keep the score of each player and do calculations with the information in the variables.
In order to group functionality all the time, students use the well-known myBlocks. The concept of behavior is introduced and the programs are organized in many threads that exchange information between each other.
At the end of the level, the robots generate problems with numbers and the students must create equations.
Most probably you have not built a robot before. So not only you will build a robot for the first time, you will also have to work with another student. In order to make those first steps as smooth and pleasant as possible, we will point out some key things in the process of constructing a robot in pairs.

This is the fifth level of the Robotics with LEGO curriculum for students in fifth to twelfth grades.
In this level students will learn how to work with data measured by the sensors. The concept of Algorithm is introduced and the programs perform calculations without knowing the values beforehand. The programming blocks transfer data between each other via data wires. The robots are designed to address the problems of security systems. Variety of alarm systems are built and the physical principles of different security methods are considered.
Most probably you have not built a robot before. So not only you will build a robot for the first time, you will also have to work with another student. In order to make those first steps as smooth and pleasant as possible, we will point out some key things in the process of constructing a robot in pairs.
The third level of the Robotics with LEGO curriculum for students in second, third or fourth grades.
In these lessons, we stress on more complex and challenging robots. The concept of Condition is introduced. Students learn about physics concepts of inertia and center of mass. Robots with two sensors are built and students program both of them. Programming becomes more complex as robots now can make complex decisions. "Spy"-robots sneakily follow their targets, trying to be undetected.

In the next lesson we usually do a graduation. Write down your impressions about the students and the reasons why they have the grades you gave them.

In the second level of Python for EV3 robots, students learn in-depth the touch sensor. The sensor is used as an input device for manual control of machines, as well as a sensor for autonomous robots. In a pair of lessons, students build a control panel for the grabber and the movement of a crane. Programming wise, students learn how to fork code with "if-else" constructions, how to create conditional and forever loops with "while" and how to negate conditions with "not" operator. In the end of the lesson, robots can detect obstacles and avoid them, so that they traverse a simple labyrinth.
Most probably you have not built a robot before. So not only you will build a robot for the first time, you will also have to work with another student. In order to make those first steps as smooth and pleasant as possible, we will point out some key things in the process of constructing a robot in pairs.
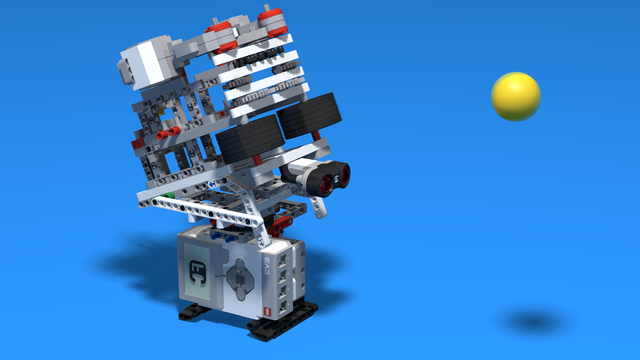
В много от занятията отборите работят върху един робот, като всеки отбор е отговорен за правилното реализиране на поетата от тях функционалност. Задълбочено се разглеждат задаването на входни стойности и използването на изходните стойности на всички блокове. Широко се използват променливи от трите основни типа: Integer, Boolean, Text. Роботите вече пазят богато вътрешно състояние, могат да броят, да изчисляват, да се обосновават логически, с помощта на което взимат много по-правилни решения. Въвежда се използването на паралелно изпълняващи се блокове.

Целта на занятието е да се реализират програми за робота BallHunter по-сложни от тези реализирани в Роботика Фи. Продължава се с използването на променливи, групиране на действията в блокове. Въвежда се прочитането на стойности от блокове. Въвеждане на блокове, които връщат резултат.
Сини и червени топки от няколко комплекта. Поне 5 топки общо.
