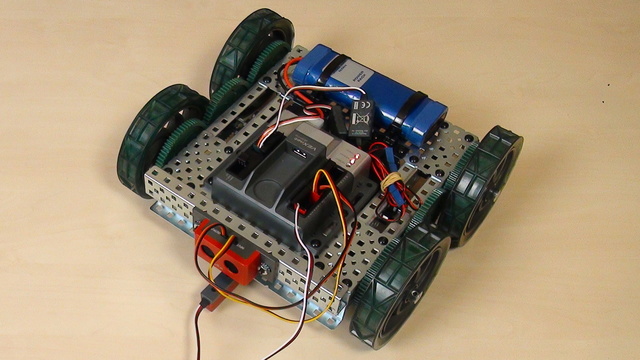

VEX EDR Intro. Arc turn with the VEX robot
The next important step when turning with a robot is to learn how to do an Arc turn.
- #334
- 26 Mar 2017
The next important step when turning with a robot is to learn how to do an Arc turn.

In the current course we would use a number of languages. Generally we would program the robots in EV3-G, but we would also program them in JavaScript to make the parallel with the JavaScript. The programming would include arrays, switches and loops.

In this tutorial, we would build a simple program for controlling the Tetrix robot motors with the GamePads. We use the stick and when the stick is pushed forward the motors move forward. When it is pushed backwards the robot moves backwards.

There are a number of tools available online to help you play the game. You just seed the initial conditions and leave the game. Let's look at some of the sites.

Display a matrix with "life" and "dead" cells on the EV3 LEGO Mindstorms brick screen. The program is available. You can see it, change it, modify it and learn from it.

In this video I am building the five minute robot from LEGO Mindstorms and I am doing a short introduction on how to make the robot move forward and turn around. Throught this series I will be using mostly NXT-G as a programming environment.

In this tutorial we would introduce you to the concept of loops using this VEX EDR Robot. As a final result we would have a program that makes the robot move in a square and not by repeating the same instructions for move and turn four different times.

In this tutorial we demonstrate how accurate the robot is when we are moving it slow vs when moving it fast. The point of the tutorial is to show that moving slowly is generally much more accurate. It is not accurate enough for a FIRST LEGO League competition, but if you have to move without the use of the sensors you can at least move slow.

We start with the previous program where we made the robot move forward and turn. We continue in this tutorial with repeating the same RobotC instructions four times. Our goal is to make the robot move in a square.
In this lesson we build a simple LEGO Mindstorms NXT calculator program that sums, multiplies, subsctracts or divides two numbers between 1 and 50.

Display a matrix on the brick screen. Simple and easy. Download and run the program to see how

By using the GamePad to control the arm with could lift it and return it back. The main problem with controlling the arm is that if you just use the motors you would hit the robot, bend the axles and breaks the gear wheels. We would use the distance sensor to make the arm move without hitting the robot.

Learn to program the Game of Life on the LEGO Mindstorms brick screen. This would require drawing on the brick screen, using blocks with switches and loops.

Following the Advance Sensor Calibration course section, we found the min and max values detected by each sensor. Now it is time for the real deal of the calibration. Detect the current value from the sensor and find what is the percentage of this value for the range between min and max.

The previous tutorial showed you how to copy/paste instructions in RobotC. The current video will introduce you to loops.

The code is already ready. It is attached below the video. Let's see how the program works and what it does and how to use it.

Starting leJOS might be very problematic, since you need to install a few libraries and make some configurations. In this video tutorial I am showing a step-by-step guide on how you could install leJOS on your Ubuntu Linux. And it is quite easy.

In this tutorial, we are controlling the FTC Tetrix robot with the two sticks of the same GamePad. The left stick is for forward and backwards, while the right stick is for left and right.

We are showing the basics of communication between LEGO Mindstorms NXT Bricks using a Bluetooth connection. In the next few minutes we will build two programs - one for the master and one for the slave brick, while explaining the essentials for building such programs.

The more advanced task is to more in a polygon. This would require calculating the degree of each of the turns and RobotC is a language in which you could implement this math calculation very easily.

In this episode I would like to show you how to enable the communication between the computer and the NXT brick, through the USB and using the leJOS project. Starting leJOS on Windows is pretty easy. But starting the samples and achieving the communication is the actual problem.

This is the first, but not the last video tutorial of the course where we reach a specific mission model in a consistent way. We use the Motion sensor and only some basic principles like turning to an angle. If we use the principles in this tutorial and then build an attachment for the mission model we will have a pretty consistent way of accomplishing the FIRST LEGO League mission

The field in the game of life could be finite or infinite. It is interesting to see and learn how an infinite field behaves and works.

The task is to find what the best seed is that will live the longest without entering into a loop or without dying. Find it and submit in the tasks section.

Control the hand of the FIRST Technical Challenge Push Bot robot with the GamePad bumpers.

