
Truck mission model. FLLCasts Off-season Challenge 2019
Building instructions for the truck mission model. The model is used in the Road assistance mission of FLLCasts Off-season Challenge 2019.
- #782
- 22 May 2019
Building instructions for the truck mission model. The model is used in the Road assistance mission of FLLCasts Off-season Challenge 2019.

Building instructions for the transportation stands mission models. The models are used in the Precise driving mission of FLLCasts Off-season Challenge 2019.

Building instructions for the container mission models. The models are used in the Automated delivery mission of FLLCasts Off-season Challenge 2019.

Building instruction for the power switch mission model. The model is used in the Power supply mission of FLLCasts Off-season Challenge 2019.

Building instructions for the construction plates mission models. The models are used in the Road construction mission of FLLCasts Off-season Challenge with LEGO Mindstorms EV3.

This is the field used in FLLCasts Off-season Challenge 2019. The pdf should be downloaded and printed 1:1. It is best if it is printed on durable canvas such as vinyl. Although we do not recomend it, the field can be printed on regular paper.

Building instructions for the bowling pins mission models. The models are used in the Bowling mission of FLLCasts Off-season Challenge 2019.

Yolanda comes from the novel "Yolanda, the Black Corsair's Daughter" by Emilio Salgari.
The robot resembles a sailship with two masts. The mast in the back is connected to a medium motor, which allows it to rotate with some limits. The mast also has a gyro sensor in the back. These are placed so that the gyro sensor detects which way "the wind is blowing" and moves the sails that way. The second mast is connected to the first one so that it moves accordingly. The robot also uses two large motors to move.

These are building instructions for a Launcher Gate. The gate is used in connection with the LEGO WeDo 2.0 lauchner that lauches objects.

Remilo comes from esperanto and means paddle.
The robot resembles a boat, but moves on land. It uses two large motors with "paddles" attached to them to move. Because its movement capabilities are limited, it has a gyro sensor to correctly move forward.

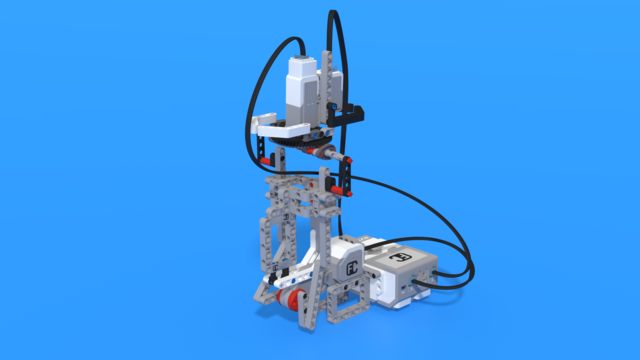
This robot was made to count coins. The door slides, making the gyro sensor rotate, and by doing that, allowing the robot to measure the size of the coin that enters the safe. By changing the points where the gyro's beam connects, the sensor's thresholds change.

This is the attachment of Team "Nightbeast", with which they :
1. Eject the 2x4 Brick by placing a Regolith Core Sample into the 3D Printer.
2. Crater Crossing
3. Tries to score a meteoroid( tries to shoot a ball)
From missions M03,M04 and M014 from FLL Into Orbit Challange

This is the attachment of Team "Nightbeast", with which they :
1. M10–Food Production
2. M12–Satellite Orbits
3. Move the Cone Module to base
From Missions M06, M10 and M12 from FLL Into Orbit Challenge
The run with this attachment is very inconsistent and fails very often.

These are building instructions for Workshop Crane with LEGO WeDo 2.0

This is the attachment of Team "Nightbeast", with which they :
1. Inserts the Tube Module into the Habitation Hub port, west side
2. Move all four Core Samples so they are no longer touching the axle that held them in the Core Site Model
3. Place the Gas Core Sample completely in Base
From missions M05 and M06 from FLL Into Orbit Challenge

This is the attachment of Team "Nightbeast", with which they solve M01 and M02 from FLL Into Orbit Challenge

This is the attachment of Team "Nightbeast", with which they do:
M11–Escape Velocity and M13–Observatory
The Observatory result depends on the model. Sometimes the pointer is in the orange area otherwise in the white area.

Value was inspired by the spy vehicle robot. This little robot was built to measure the volume of the room he's in.

The name comes from the worlds most expensive yacht, History Supreme, purchased for around 5 billion US dollars form an anonymous Malaysian buyer.
Robotics Supreme is a robot made to resemble a yacht. For that purpose it is made to look very long and its front comes to one point. It uses two large motors with tyres to move. On the front it also has a color sensor, placed so the robot can follow a line. On the back it has a Gyro sensor, so that it can turn correctly.
Uylam is a robot that simulates a stormy environment for its ship. It is made using two piston-like mechanisms powered by a Large motor and offset by 90 degrees to create shaking similar to that of big waves. The ship itself is made out of a medium motor on a turntable and a gyro sensor attached to them. The purpose of this is to explore what is the best position of a ship compared to the waves, so that it sustains the least amount of shaking.