
WRO Box Collecting Robot
Building instructions for this LEGO Mindstorms EV3 robot used in the World Robotics Olympiad Junior competition
- #185
- 20 Mar 2016
- 4
Building instructions for this LEGO Mindstorms EV3 robot used in the World Robotics Olympiad Junior competition

The central axle of the robot is most of the time the most important. The robot moves forward and does things with this axle. It is important to learn to you could extend such axles, and change the level and position of the extensions.
This is a LEGO Mindstorms EV3/NXT robot attachment.

Building instructions for a robot for the World Robotics Olympiad Sputnik competition. This is the light version without the lift at the top.

Probably the largest multi-purpose FLL attachment at FLLCasts. These attached is doing a number of missions at once. 4 of them. You attach it to the robot and start the program. The robot moves and accomplishes a number of missions using only this attachment. At it also has a lot of parts. It is quite large and you can not build it from a single set. But that's ok because you are preparing for a competition, right?

Robot attachment that shows you how a circular motion could be transferred to linear by using a gear and a rack. The final motion is for pushing and pulling things.
The attachment could be built from LEGO Mindstorms EV3 and NXT parts.

Accomplish three FIRST LEGO League missions at once. This is an interesting Large multi-purpose FLL attachment for a box robot that could be used to accomplish a number of missions with a single exit of the field base.
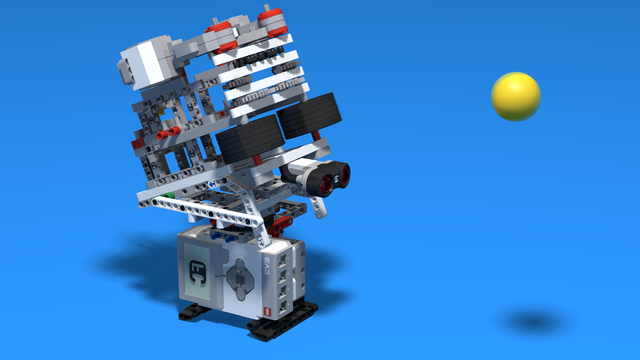
Инструкции за конструиране на количка от Лего, която може да изтрелва 40мм пластмасови топки за пинг понг. Роботът се задвижва от два големи EV3 двигателя, а приставката, изстрелваща топките, от среден EV3 мотор. Роботът може да носи до 6 топки и разполага със сензор за разстояние.

We have to admit. This is quite an interesting missions. There is a Manhole cover and it must be turned upside down. Well, the robot must turn it. Again LEGO Box Robot Three With Large Wheels and Thee light sensors and one Gyro is used as a base for the Robot.

Building instructions for the One Attachment. Built from LEGO Mindstorms EV3 parts and with an Ultrasonic sensor we've used this attachment to accomplish most of the missions at FIRST LEGO League 2013.
SIngle robot attachment, many points.

Инструкции за построяването на състезателен робот на принципа на “Box” робота. Този робот е построен с ЛЕГО Mindstorms EV3 и може да се използва на състезания като FLL и WRO.

Втора част на инструкциите за шасито на този състезателен робот от ЛЕГО Mindstorms EV3.

Building instructions for the LEGO Mindstorms EV3 robot used for accomplishing WRO 2014 mission. It is the full robot with the lift at the top

Това е истински състезателен робот с три сензора за светлина и един сензор за ускорение.

This is a simple pinless active attachment for the SUV Box Robot.
In this attachment we use "(32498) Technic Gear 36 Tooth Double Bevel". There are four pins added to the wheel and it it this pins that engage with the "(32072 ) Technic Gear 4 Knob". The more important thing is that the knob wheel and the gear wheel are parallel to each other.
While the motor rotates the attachment has 4 points of contact (instead of one or two when two Knob Wheels are in contact) with the robot knob wheel. There are no forces that drive the attachment to jump and lose engagement with the robot.

It's a box! It's a robot! It's a box robot. Box robots are very popular on different robotics competitions involving LEGO Mindstorms like the FIRST LEGO League or World Robotics Olympiad. Let's start with a brief introduction and continue in the next videos with explanation on the features of the robot and why such robots are frequently used.

Here we start with a second box robot that we would like to build. It is in a way improvement to the first robot and we would take a look at its features.

There are a few main challenges with box robots and in the following tutorial we would like to resolve them. Read on and let's see how we could do this.

This attachment uses a connector ("(98585) Technic Connector Circular With 2 Pin Holes and 3 Axle Holes") with 4 pins to connect with a knob wheel ("(32072 ) Technic Gear 4 Knob") of the robot. Because both elements are parallel one to another there is no jumping effect.
The attachment uses two pins, but it is easy to attach and detach because it uses "(6558) Technic Pin Long with Friction and Slot". When you attach or detach the attachment the slots are keeping the pins strong on to the attachment.
Also an attachment connected to the robot in this way, can be move to the rigth knob wheel or to the left knob wheel.

This is a frame for the SUV Box Robot. Tis frame is an adapter between the robot and the attachments. You can add-in several attachments on it and mount them on the robot simultaneously with one movement.
The frame has two locks that make the attachments stick to the robot. Also the front Knobs must not be used for very powerful activities due to jumpings, unless the frame with attachments become heavy enough to prevent any jumping of the frame.

Here is an example of Four(4) active LEGO Mindstorms attachments built-in the frame. Two by two they work asynchronously since all of them are connected to the two separate middle motors of the SUV robot via the frame.
The left attachments work synchronously, and the right attachments are also synchronized couple.
These specific attachments are meant to do nothing in particular, but to serve as an example. Their purpose is to demonstrate different ways in which one could add an attachments to the frame. Experiment. Think and invent better frame with real world attachments that could actually do efficient work and accomplish a mission. Take a video then and share it with us.
![Image for [How NOT To] Build An Active Attachment For SUV Box Robot](https://d2nmr6p48f8xwg.cloudfront.net/content_pictures/pictures/000/002/747/dd1e2e4891f89a09cc95df3c462236632bbf60d8fllcasts-competition-fll-robot-lego-mindstorms-attachment-that-is-no-good-038A5726.JPG)

The video shows why you should not build attachments such as "Crappy Active Attachment For SUV Box Robot". In the video one can see how the knob gear wheels start "jumping", once a force is applied to the lever.