We use a sensor so the robot must be reliable and accurate right? Wrong. The robot is not reliable and accurate only because we use sensors and that's really important during FIRST LEGO League competition. There is a reason for this and in this tutorial we demonstrate and explain how the robot behaves with a basic use of the Motion Sensor to move straight. As a result you will learn why is it important not to stop at this stage and to go to the next level with more advance use of sensors.
- #1930
- 28 Jun 2022
- 3:37
- LEGO Education SPIKE Prime
- Move straight, 10 out of 10, Scratch, LEGO Education SPIKE App Word Blocks 2, Programming, Motion Sensor, Gyro Sensor, Sensors
How to use this tutorial?
Download the program to the robot and experiment with the robot to reach the mission model. Even if you don't have this particular field, you probably have other fields and you can change the program to work for the other fields. Change it. Change the values of the my blocks and then experiment with the consistency of the robot. In this way you will be prepared for the mistake you can expect from the robot.
English
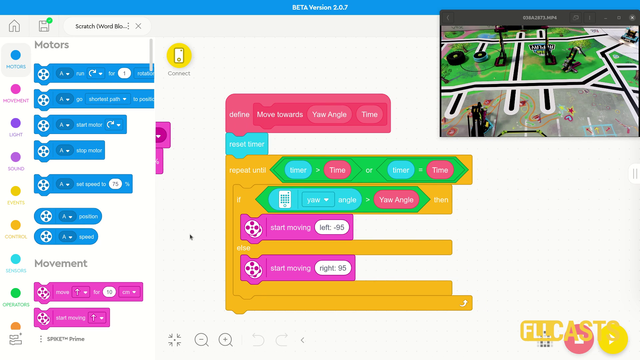
In this video tutorial we use a LEGO Education SPIKE Prime, the motion sensor, a basic program and we try to do ten runs to demonstrate the consistency of reaching a mission model.
Now let's start and see how consistent the robot is. We move forward, start from the base, we try to reach the mission model and even with the first run we can see that we couldn't actually reach the mission model from the right direction. We got there, but it's impossible now to solve this mission model with an attachment, because we got there not from the top of the mission model, but rather from the left of the mission model. But let's run the program again. It has a sensor, the robot has a sensor. So it should be consistent, it should be reliable, right?
We've described in the previous tutorial this behavior of moving left and right, left and right, and it's a standard algorithm. And on the second run we can see that the robots still couldn't reach the mission model. Something is going on with our robot. It is not consistent and it's definitely not reliable. Start again. We move forward, turn to the left, turn to the right and you can see that even it doesn't make the same mistake if it was making the same mistake each and every time, then probably we can try to fix this, we can try to improve this, but it's difficult. It makes a different mistake each and every time it arrives to the mission model from a different angle, which is kind of strange. What's going on here? And the reason why we are demonstrating is that this program, it relies on the fact that we start the robot from the same time, from the same place in the base and it has to be precisely the same place and facing precisely the same direction. If it is like two degrees to the left, then it will not arrive with the mission model. It is extremely important how you start the robot from the base. It is extremely important to have an attachment that could help you align the robot in the base. And only this way you can be sure that you are doing the maximum to start the robot from the base in the same way each and every time. If you just try like us to start it with a hand, it's not working, it's difficult and practically it's impossible. Even though the program is powerful and the program works the same way each and every time, the initial positions of the robot is different and this changes the whole behavior of the robot. Download and experiment, see for yourself.
Курсове и занятия включващи този Урок
Този Урок е използван в следните курсове и занятия.

LEGO Education SPIKE Prime Programming for Competitions with Word Blocks
Two fundamental concepts are essential for robotics competitions: ensuring the robot consistently navigates and positions itself accurately on the field and designing attachments that complete missions once the robot reaches its target. This course focuses on the first aspect - precise navigation and positioning - while the second is covered across the entire FLLCasts platform, starting with the FIRST LEGO League with LEGO Education SPIKE Prime. "Challenge" competition for 9-16 years old
The goal of this course is to help you learn how to program LEGO Education SPIKE Prime robots to operate consistently and reliably in competition settings. We use LEGO Education SPIKE App Word Blocks, a Scratch-based programming language, to teach key techniques applicable to FIRST LEGO League and World Robot Olympiad competitions. Topics covered include different methods for line following, such as fast, slow, smooth, and using multiple states, as well as techniques for line alignment, double alignment, and maintaining a straight path using the motion sensor.
- 40
- 188:21
- 19
Motion Sensor - Accurately reach a mission model with advanced programs
In this video tutorial we use the LEGO Education SPIKE Prime Motion Sensor to reach a mission model on the field. It's a basic use of the motion sensor that we will extend in the next few tutorials and in the same time we take the opportunity to demonstrate what a MyBlock is and how to develop one. As a result of this video you will learn how to make the program easier to read and maintain by organizing the blocks in the program in special MyBlocks that couple them all together.
- 2
- 0
- 1
- 3d_rotation 1