It has been a long road with the last 8 BigDaddy competition robots video tutorials, but we finally arrived at the Differential Lock.
- #80
- 19 Apr 2015
- 9:57
The differential
To remind yourself about the differential and its purpose you can take a look at this robotics video tutorial. In summary a differential is used when you need to have different rotation speeds on two wheels while controlling both wheels with a single motor. Using a differential in a robot constructions you reduced the friction between the tires and the mat and the LEGO Mindstorms robot is much more precise.
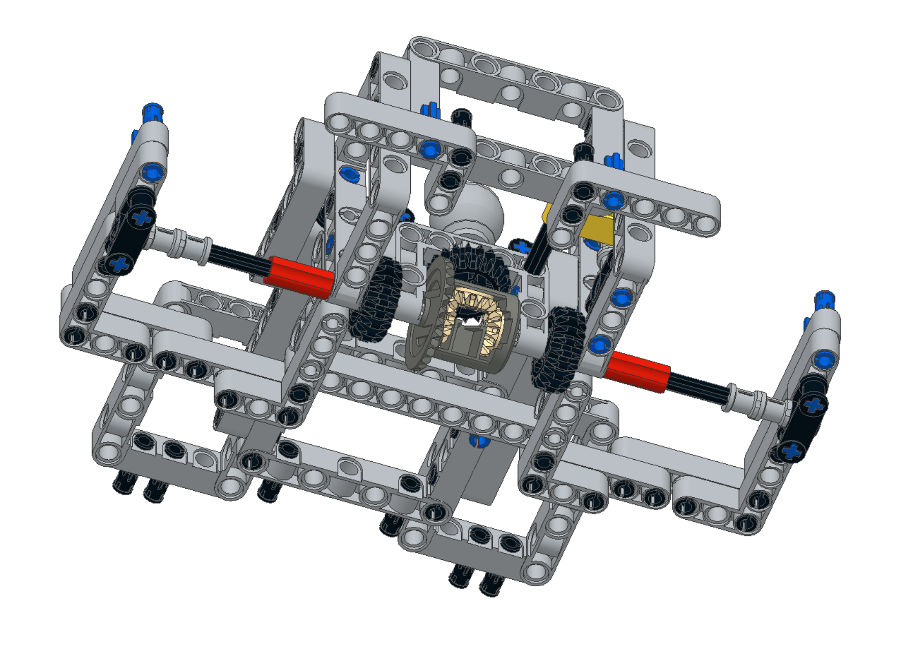
The lock
Not always, but sometimes using a differential has a negative impact on the robot road-ability (this means going "off-road"). Then, it is good to have the lock that would make the wheels move in sync. Take a look at the video tutorial to see the lock in action.
Other episodes from the series:
Constructing BigDaddy Competition Robot (Part 1 - Front)
Constructing BigDaddy Competition Robot (Part 2 - Front)
Constructing BigDaddy Competition Robot (Part 3 - Front to Rear)
BigDaddy Competition Robot (Part 4 - Complex Transfer of Power in a Triangle)
BigDaddy Competition Robot (Part 5 - Power to Rear Wheels)
Positioning motors on BigDaddy Competition Robot (Part 6)
Positioning motors on BigDaddy Competition Robot - Second try (Part 7)
Correct position of motors on BigDaddy Competition Robot (Part 8)
English
- In this episode we're continuing with differential locking. A mechanism that we added to the BigDaddy competition construction. We're going to discuss how to build a differential locking, what's the purpose of differential locking, and how and when to use it.
Let's just remind ourselves what's the purpose of the differential. The purpose of a differential that you can see in many machines, especially in cars, is that you can have both wheels turning in the same direction or in opposite direction. And they're both controlled by one motor. For example, as you can see now, both of the wheels are turning in the same direction. But you can also have one of the wheels turning in the other direction. And that's achieved with the use of differential. Check out the previous videos on how differential works. Sometimes when you want to achieve higher roadability. So, we want to go off-road. Not always, but sometimes, it's useful to have a differential lock. In this way you'll lock the differential. And once the differential is locked, both tires are turning only in the same direction. So, you can't have one of the tires turning the other direction. For example like this. You see? They don't continue. Now, I unlock. And I have them turn independently. Let's deconstruct this robot and I'll show you step by step, how do you construct it and how you build the lock mechanism. I have already deconstructed part of the robot from the rear part. You can see the differential. We can turn the tires, the wheels in different direction or we can turn them in the same direction like this. And this is how differential works. That's the main point of having a differential. Now, we're gonna add the lock, the differential lock. And we should place it like this. And then the axle. Now, this is important: the main principal differential lock. Currently the whole differential is unlocked. We can again turn in the same direction or in different directions. But when we lock the differential, this is no longer possible. And we can only turn the wheels in the same direction. It's not possible to turn them in opposite directions. The rest from here are just implementation details. We're gonna add a lever for locking and unlocking. Because it's not very convenient right here at the bottom. And some additional parts to improve the stability of the lock. But the principle's like this: you unlock, it behaves as before. But when you lock, both tires, both wheels, turn in the same direction. Our next step is to add the lever. And we use this lever for locking and unlocking the differential like this. And let me just turn the robot. I want to position the lever in the back right side of the robot. I have my parts and I'll place it like this over here. And now I can lock and unlock. Lock. Unlock. We must also fix the lever. Here the lever is fixed. Locking and unlocking works. And we now just finish off some of the construction. What you can notice is that at the end there's much pressure on these parts. And we thought a way of how to fix them so that they don't move and it's an interesting solution. But it requires a little bit of force to place the parts. It truly works from the first time. Let me just try . . .here it is. The first one is fixed. It's not on . . .no longer possible to move. And the second one right here. And we finish the frame. I'll put this side. And now we attach the wheels. Sorry, wrong direction. Here we have the robot with differential that can lock like this and unlock. And we can turn the tires in different direction, turn the wheels. And now, additional--, one additional part for holding the lever. And now our finished construction will look like this. When we unlock the differential it will be possible to turn the wheels in opposite direction. But when we lock the differential manually, it's now no longer possible to turn them in opposite direction. You can only turn them in the same direction. Where should you use this mechanism? When you want to build a robot that can go offline--, off road. And you can improve the roll-ability of this construction.