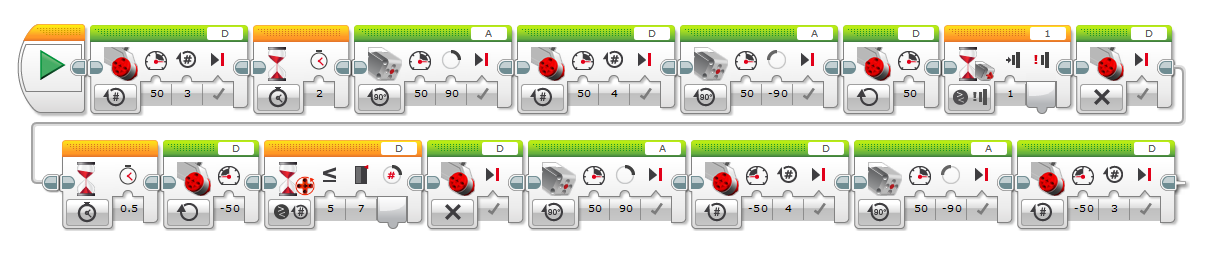
Repeat the program for reaching the end of the rock and waiting for several seconds, although it might need some adjustments. After that the robot should make a 90-degree turn by first turning its tail fin, then going several rotations forward and then straightening its tail fin. Next, the robot continues forward until it reaches the wall, i.e. the feeding spot. It then waits for half a second to feed after which it returns. The important part here is that students should calculate the total number of pre-set rotations by adding the number of rotations to the first feeding spot and the number of rotations for the 90-degree turn. So, if the robot has to go forward for 3 rotations until it reaches the feeding spot and then turn for 4 rotations, the "magic number" is 7. In order to return to the first feeding spot, the robot should move backwards until the rotation sensor gets back to the value we calculated. In our example 7 rotations, as shown in the picture below.