Move the robot to the bring. Bring the flags up
- #1422
- 21 Aug 2019
- FIRST LEGO League, FIRST LEGO League 2019-2020 City Shaper, Mission Models, FLL, FLL 2019, Tips and Tricks
Scores:
Score all that apply
- If the Robot is Supported by the Bridge: 20 and
- If one or more Flags are clearly raised any distance, only by the Robot: 15 Each Flag

Note: You can only get Flag points if you get Bridge points.
Note: Rule 31 allowance: It is okay and expected for Robots to collide while trying to earn Flag points.
Note: When clearly only one Robot is holding a Flag raised, only that Robot scores for that Flag
(mission descriptions source https://www.first-lego-league.org/)
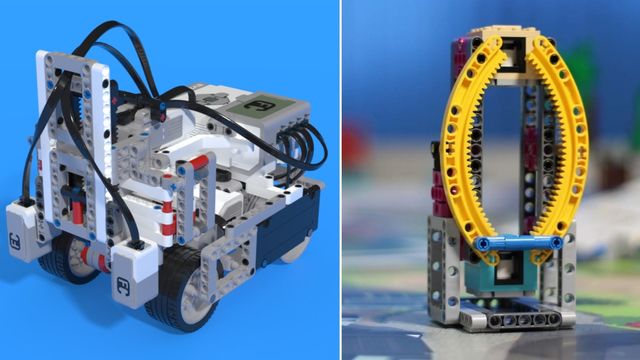
FLLCasts Tip:
All you have to do at the end of your run is to park the robot on the bridge and lift the flag to get 35 points. If your attachment pushes the second lever and the second flag is raised, you will have 50 points. If you are aiming only for 20 points, you can just park your robot on the bridge. However, since it is easy to park it ontop of the lever for the flag, it is an easy way to gain 15 points. To get to the bridge you may follow the line next to the Traffic jam (Mission 06) and align to the perpendicular line. It helps if you have accomplished the Traffic jam (Mission 06) because you won't have a mission model in the path of your robot.
Courses and lessons with this Tutorial
This Tutorial is used in the following courses and lessons
FIRST LEGO League (FLL) 2019-2020 City Shaper Challenge. Example solutions with explanations. EV3 and SPIKE
You probably know that every year we're releasing a Solutions and Review course for the missions of FIRST LEGO League competitions challenges. This year the situation with the competition is a bit different, but here we are - sitting here, acting kinda normal, figuring out what robot should we build to accomplish every mission 10 times in a row.
- 23
- 6:58
- 20

M01, ELEVATED PLACES with SPIKE Prime
In this tutorial we accomplish the Elevated places with the Whakatae - LEGO Education SPIKE Prime Competition Box robot mission. It is important to be able to go over the mission model and at the end with a simple mechanism we just push the mission model at the end
- 2
- 0
- 3
- 3d_rotation 1