Collect the humans and clear them from the rocket launching region. This is rather straightforward as a task, but it requires a little bit of thinking if you want to do it without manipulators.
- #181
- 30 Nov 2015
- 2:26
- LEGO MINDSTORMS, LEGO MINDSTORMS EV3
- World Robot Olympiad 2014 Robots and space, World Robot Olympiad, WRO 2014, EV3, WRO, Construction, Programming
Below you could see the field of the World Robotics Olympiad (WRO) 2014 Elementary challenge. The humans must be moved from the field to the red region.
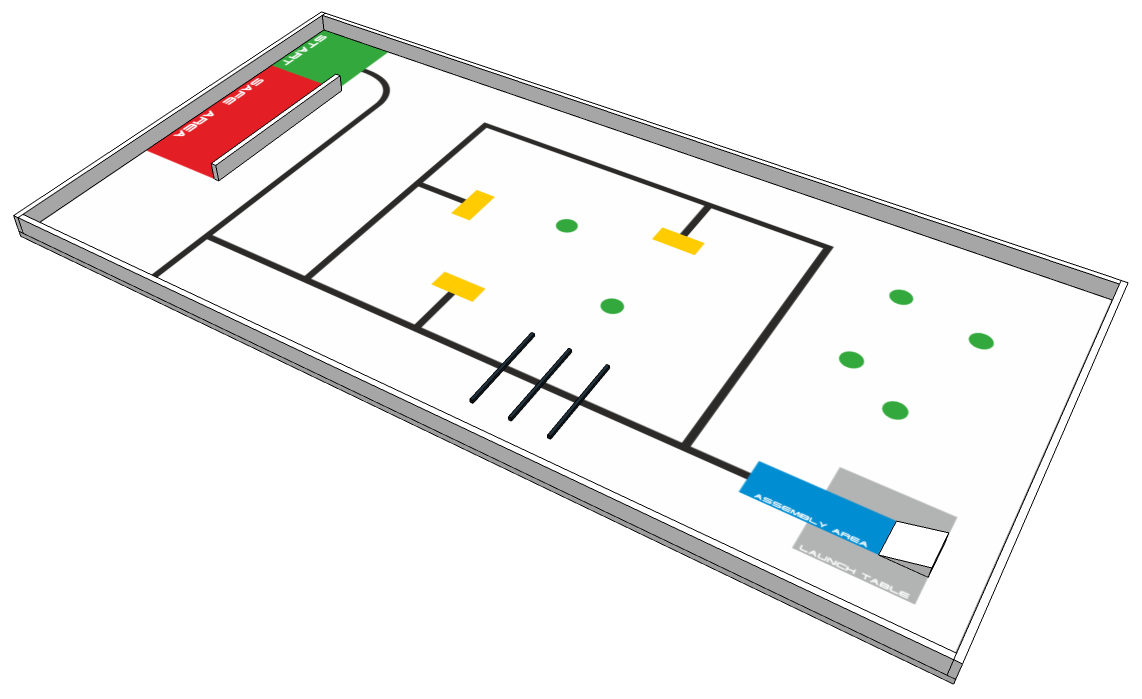
For this robotics competition we use a robot that has a container inside of it and can collect the humans inside. This is an interesting robotics design that could be used for smaller objects.
Previous videos:
WRO Robot 2014 Elementary
Building instructions for the robot used in WRO 2014. It is a small robot with two light sensors and could be used for collecting elements.
The robot is built from LEGO Mindstorms EV3 parts.

![]()

English
Previously we did a small example on how can we collect the rocket elements from World Robotics Olympiad (WRO) 2014 competition and we collected the elements, we positioned them like this and we lifted and we were ready for firing the rocket. Before firing the rocket we must clear the whole field, all the humans.
This is the subject of today's video.
How to clear the humans, we have 3 humans positioned in places on the field and you can find a map of the field below the video and, of course, in the previous video we had a sample run. Now how do we collect the humans. This here is our robot. For this robot we use the medium motor to control an attachment that will collect the elements for the rocket. So we want to use a motor for collecting the humans. What we came up with is to use the belly of the robot, we'll build a robot with a belly, an empty belly and with this belly we'll add an element that's kind of a carabiner, so it's letting things get in but it's not letting things get out. As we move over the humans, like this, we move over this human, we take it and then we have the human in the belly of the robot and we can move. Then we can collect the other human, like this, and again move and as you can see they are right here in the belly, but because these axles don't let the humans escape it's quite interesting solution. Again we move, we collect, like this and then we move over the 3rd human and we have all the humans in the belly of the robot and we can continue and return them back to base to the safety zone. That's how we collect the humans. Very simple. Find the instructions for this robot below the video.
Courses and lessons with this Tutorial
This Tutorial is used in the following courses and lessons

World Robotics Olympiad (WRO) 2014 Elementary. Review of solutions with explanations
This playlist of videos is about World Robotics Olympiad 2014 Elementary Challenge. Modules are positioned on different places on the fields. The robot must collect and bring the module near each other. The it must lift them and place them like they are ready for "rocket launching". In the mean time Humans must be collected and returned to the safety zone. We build a robot with a grabber and in interesting program for solving the missions.
- 3
- 16:45
- 0

Collecting humans. Moving modules. Humans
Collect the humans and clear them from the rocket launching region. This is rather straightforward as a task, but it requires a little bit of thinking if you want to do it without manipulators.
- 1
- 0
- 0
- 3d_rotation 1