Based on a request we are showing the robot construction with two rear motors instead of a differential. In this way, as a construction, it is closer to more students, but much more challеnging for programing.
- #81
- 26 Apr 2015
- 9:43
The two rear motors VS the differential
Many LEGO Mindstorms robot constructions use two rear wheels controlled by two different motors. Students are used to this kind of construction. The differential is a little bit more abstract and difficult to understand and use properly. Based on a request we have decided in this video tutorial to show the Big Daddy construction implemented with two rear motors and one front motor. Programming this construction would be challеnging so we have prepared a challеnge (see the task).
Other episodes from the series:
Constructing BigDaddy Competition Robot (Part 1 - Front)
Constructing BigDaddy Competition Robot (Part 2 - Front)
Constructing BigDaddy Competition Robot (Part 3 - Front to Rear)
BigDaddy Competition Robot (Part 4 - Complex Transfer of Power in a Triangle)
BigDaddy Competition Robot (Part 5 - Power to Rear Wheels)
Positioning motors on BigDaddy Competition Robot (Part 6)
Positioning motors on BigDaddy Competition Robot - Second try (Part 7)
Correct position of motors on BigDaddy Competition Robot (Part 8)
Differential Lock on BigDaddy Competition Robot (Part 9)
Courses with this episode
The episode is used in the following courses where you can find additional tasks for it to use in class
Big Daddy
How would you program this LEGO Mindstorms robot to move? It probably requires controlling the three motors in parallel. Use the task in your classroom, for your team or at home to set a challenging programing problem.
There are 3 task from an normal, medium, hard complexities giving 1, 2, 3 points respectively
Tasks description, submission and evaluation are available to subscribed users.
Subscribe now to access the full capacity and get feedback.
English
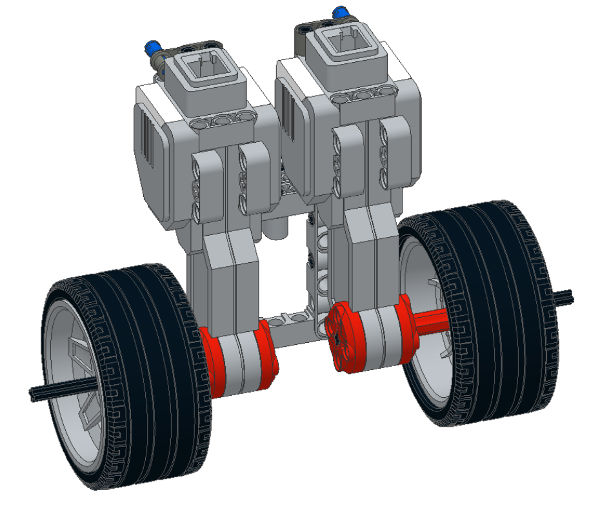
- Based on your comments, we've decided to do an experiment on our BigDaddy construction and to try to add two motors at the rear part that will transfer power to each of the wheels, and one motor at the front that will turn the front part of the robot. In today's video, we're going to construct the robot and see how it works. First, I'll start with two EV3 motors that we'll attached to the wheels. And wheels, again the large wheels from the EV3 sets. Let's attach the first wheel. The second one. The challenge here with such large constructions is how to have the same distance between the rear wheels as in the front wheels like here. So, we must find the way to position them and to have the same distance. We'll add this grey frames. Now add one grey frames-, grey frame at the back with the blue pin here. And now we have the two wheels attached to the motors. And if we measure distance, we can see that distance between the front wheels is the same as the distance between the rear wheels. But this construction is not very stable because we have the motors attached only one place. And as you can see it's quite fragile. And again, we add a second frame to the other side of the motors. And now we have a much more stable construction. This is how the construction will look at the end. You'll have the front of the robot and the rear part of the robot with the motors. In the next step, I've already prepared the frame around the wheels. You can find the instructions for the frame below the video. I'm not going to construct it, the whole frame. But as an end result, we must add the frame around the wheels. And this way we can use the frame to align, to attach attachment, to protect sensors and the other interesting things we're talking. And now we have the frame. The frame is attached only on two parts, two sides. Here on one axle and here on the other axle. And as you can see it is moving. As a next step, we must attach the frame to the motors and make it stable.
Thank you Komolov Pavlo who came up with a number of solutions. But we like always the solutions that use as few parts as possible. And we've done this module that we attach to the frame. Here on the right frame and then to here. And now we'll just click and the frame is attached. Again the frame is attached only one part of the motors and we must also attach the frame to the other parts to make more stable. This is the module that we're using. It's not very complex. It's again, angled beams, some pins. We add this angled beams to the frame.
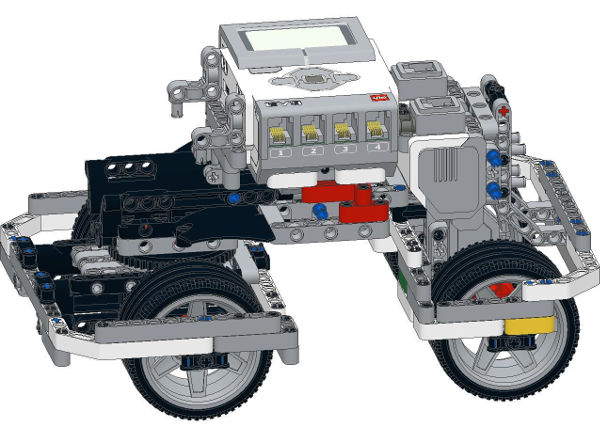
And now we attach them. It is always a good practice to have all of your models in a way that you can attach them and detach them very easily, separately. And to fix the whole construction, we just add this pin. Here it is. A very nice, good looking, stable construction with two motors. Each motor is attached to a wheel. And this whole rear part of the robot will be used. And we'll attach it to the front of the robot and let's see what happens. In order to attach the rear part to the front part, we're starting with this front part of our BigDaddy construction. And you can find the construction below. It's a-, it's a front part that we've already done in a previous episode. Again, find the link below the video. And we continue with adding a simple frame. Here it is. With these grey frames, we just add them to the front part. Now we lock the other frame and we add to the back of the robot. Here our construction is looking quite nice. It's not very stable. But we improve this. The next step of our construction is to add the brick. Here's the brick. And a nice place for the brick's probably here. Of course we can place it in other ways. But let's not forget that we must also have a motor at the front that will turn the robot. So let's add first the brick. In order to add the brick, we must somehow attach to the motors and the frames. For the motors, we are using these parts. And for the frame, we add a part here. Let's try this. One and second. And here we have the brick on our robot. As a final step, this is how the middle motor will be used We have a small pin and we'll attach it's not even a pin, sorry. It's a two-hole axles. It's an axle with two lengths. And we'll attach this motor at the front of the robot. Right here we have the axle for turning the wheels. And if we attach the motor...
We have our motor at the front and we can transport power to this motor from the brick and will turn the front part of the robot. And we have the rear part of the robot with two EV3 motors. Each motor is attached to a wheel. And the whole construction is much more stable. And it's kinda interesting. Now something that's . . .while experimenting with this robot, we found out that it's a-, it's quite easy to detach the whole construction and we've decided to do a little hack. And you might see these hacks in different situations. Especially when you have such robots that you're experimenting. But let's just know that our hack is just two pins and the one small pin. And they should be attach to the really difficult place right here between the motors in order to improve the stability and to be difficult for the motor to break. And we didn't, so it's . . .initially. But after a few experiments we saw that this part is actually needed. You will find it in the constructions. And let's try to add it. This is the part. Right-, right here. See? And as a result, we have our BigDaddy construction with the two motors and very modular construction. We can deconstruct and construct it in different ways. In the next video we will probably continue with how we program this robot and we'll think of some very interesting tasks for you on how do you experiment with this robot.