This time we stop on "Using the Right Senses" mission, or actually on how to solve the "Right Senses" mission without "Senses" (sensors). To achieve that we use the carabineer counstructed in one of the previous tutorials, of course after a small modification.
- #90
- 24 May 2015
- 4:04
- LEGO MINDSTORMS, LEGO MINDSTORMS EV3
- FIRST LEGO League, FIRST LEGO League 2014-2015 World Class, Attachments, EV3, FLL 2014, FLL, Construction
Once again the video begins with repeating the mission requirements.  You can find the full document with all mission rules here. As in Episode 89, where we were interested not only in solving the mission, but in taking the loop, here we proceed the same way.
You can find the full document with all mission rules here. As in Episode 89, where we were interested not only in solving the mission, but in taking the loop, here we proceed the same way.
In Episode 47, we made an overview on how to take loops and suggested a carabineer attachment for taking the loops. In the "Robot Competition" mission it was hard to implement this solution, but today I have stopped on using a carabineer for taking the loop from the mission model. You could find building instructions under the Materials tab, below the video in Episode 47.
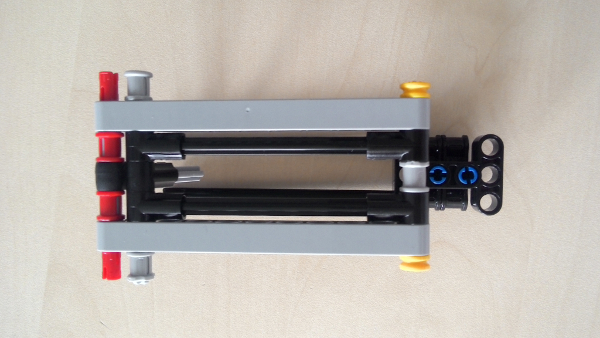
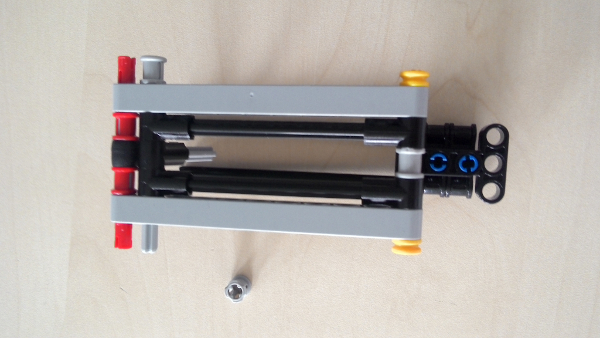
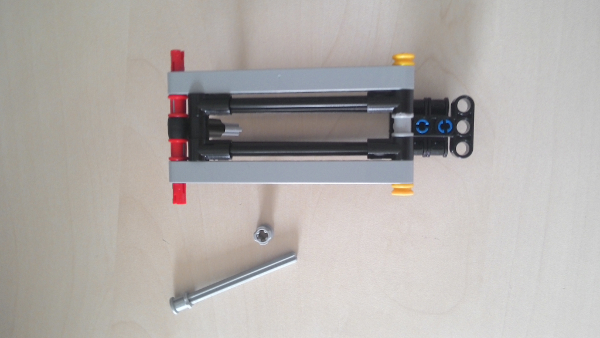
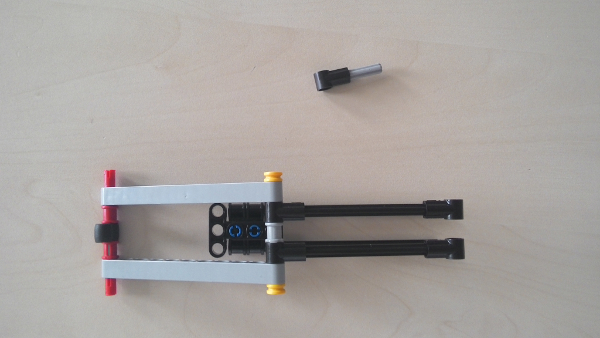
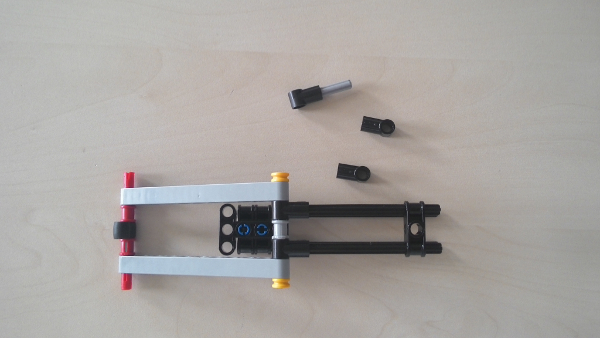
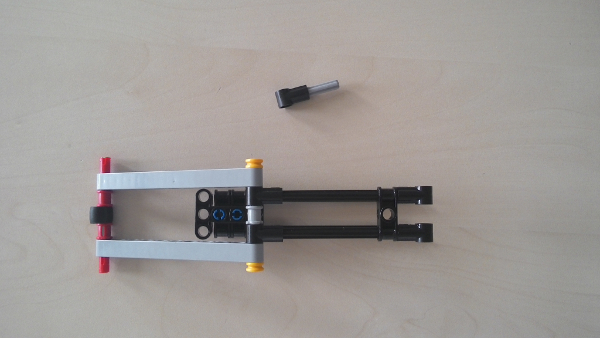
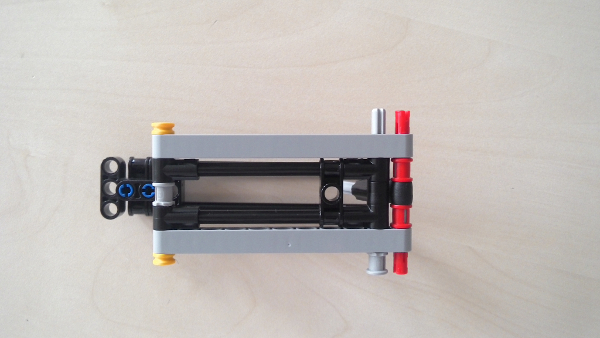
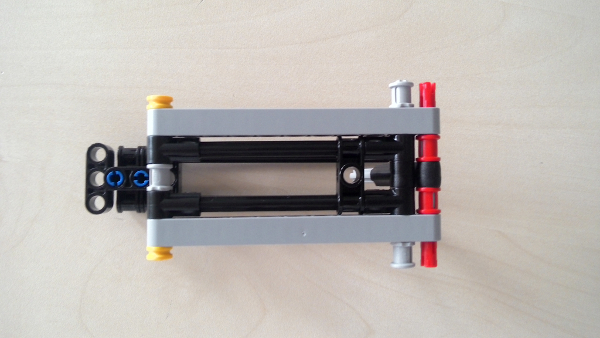
However we face another challenge. When the lock falls down it locks the carabineer. To overcome this we add one more part to the carabineer as shown below:
Your turn
Did you like the idea? I would love to hear your suggestions for solving the mission!
Let us know in the comments below!
English
- Today, we continue with the next mission from the 2014 First Lego League World Class Competition. I have decided to review using the Right Senses mission. The mission is easy I believe, but the challenge is how to achieve 100% success rate and how to solve it as easy as possible in order to have the opportunity to solve other missions on the same run.
As usual, we begin with repeating the rules. The required condition visible in the end of the match to score the mission is that the loop is no longer touching the mission model. Here, once again, we have a required method for solving the mission-- the loop should be released due to the movement of the slider only. So you could not lift the part that walks the loop and take loop, but you need to push the slider in order to unlock the loop. The tricky part is that you should be careful with how much you push the slider because it can fall back and lock the loop once again. Here, I believe that taking the loop out of the mission model and taking the loop back to base are equivalent, but the second could give you extra points if you're planning to solve the project based learning mission. So from now on, my goal will be to take the loop back to base. We have many possibilities to achieve that, such as using an angle beam to walk the loop to the ground, or use an exo and et cetera. However, I believe the easiest way is to use a carabiner like the one from Episode 47. Actually, I will use the exact same for the purpose of the tutorial. Now, let's move on to the actual solving of the mission. You could attach the carabiner to the front of the robot and depending on robot construction you are using, this can be done in different ways. But here, I will use this dummy front where I have attached carabiner. Now when you put the robot against the mission model, the loop is unlocked and then, if you go back, the loop is taken. This will work in most cases, but have one downside--you need to be precise with how much you go forward. If you go to much, you can break the carabiner or the mission model and therefore fail the mission. If you do not, it is possible that the carabiner will not lock the loop. Of course, you could use the black line in front of the mission model to align, but it would be better if we make it simple, wanted. To achieve that, you need to put the carabiner closer to the center of your robot or if this is not possible, just add the parts, such as this one, to the front. Now we can make our robot go forward for a second or so. And first, the carabiner will lock the loop and second, the robot will be aligned to the mission model. In this case, we push the model in more stable point, so the probability to break is small. However, we face another challenge. If you push the slider all the way, the lock falls once again and locks the carabiner. So now, you could not go back without breaking the model. To overcome this, we will put something between the two axels. I have put this Lego Technic cross-block here. And now, if I push dummy against the mission model for one second and then go back, the loop is taken and the mission accomplished. Now, let's see a team using this technique. Now is your turn. Do you like the idea? I would love to hear your suggestions for solving the mission in the comments below. Bye.
Courses and lessons with this Tutorial
This Tutorial is used in the following courses and lessons

FIRST LEGO League Competition. Attachments
This course is a collection of materials for many of the attachments that we've built at FLLCasts before introducing courses. The videos were built as separate different attachments for different competitions and with the following course, we try to give it a structure.
- 60
- 347:26
- 0

FIRST LEGO League 2014 World Class. Example solutions
In this video tutorial we experiment with different ways of solving the sports mission for throwing the ball. We show seven different LEGO MIndstorms EV3 and NXT robot constructions and attachements. Most of the techniques could be applied for any mission involving throwing a ball or an object.
- 16
- 0
- 0
- 3d_rotation 7

FIRST LEGO League (FLL) 2014 World Class. Review of solutions with explanations
These are a couple of structured examples and tutorials of how the missions for FIRST LEGO League 2014 Word class competition could be accomplished. We've gathered recordings and explanations from which students and teacher can learn a lot. There are missions and attachment for rubber bands, lifting with rubber bands, throwing and other interesting and challenging robotics missions from the competition.
- 16
- 85:15
- 0

"Using the right senses"
This time we stop on "Using the Right Senses" mission, or actually on how to solve the "Right Senses" mission without "Senses" (sensors). To achieve that we use the carabineer counstructed in one of the previous tutorials, of course after a small modification.
- 1
- 0
- 0
- 3d_rotation 0

FIRST LEGO League 2020-2021 RePlay Solutions and review with SPIKE Prime
This course presents Solutions and Review of the FIRST LEGO League 2020-2021 RePlay competition. We do such a course every year after the competition. By moving through the course lessons, building the robot and attachment and completing the missions you will learn how to achieve FLL mission following good engineering principles for building robots, attachments and developing programs. Upon completion of the course you will have many new ideas about how to approach mission on every FLL robotics competition and how to help your team score more points.
- 74
- 158:11
- 15

M02. Step Counter
In this FIRST LEGO League video tutorial we accomplish the Step Counter mission from the FLL 2020 RePlay mission. The mission model is quite interesting as it can not be pushed fast and it can not be pushed slowly, because it will jam. The robot must push it with the right speed and this proves to be difficult.
- 7
- 0
- 1
- 3d_rotation 3