- #202
- 01 May 2016
- 4:00
- LEGO MINDSTORMS, LEGO MINDSTORMS EV3
- World Robot Olympiad 2014 Robots and space, World Robot Olympiad, Container, Space, WRO, EV3, WRO 2014, Balls, Container, Space, Light and Color Sensor, Construction, Programming
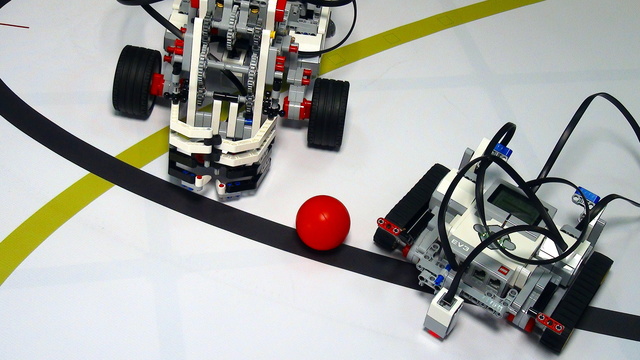
WRO Catch and Move Robot. Full Version
Building instructions for the LEGO Mindstorms EV3 robot used for accomplishing WRO 2014 mission. It is the full robot with the lift at the top

![]()

English
- The robot for our World Robotics Olympiad 2014 Junior High Competition is improved for today's video. And we'll release the ball that we've collected to the satellite that we must release them to. Let's see how this works.
First for this container at the top of our robot, this container, we can lift this container and we release the balls as you saw. And this container it works in the following way: we have a medium motor. And this medium motor turns first power to an axle right here. And when we rotate this axle we lift the whole... Let me just release on the motor like this. When we rotate the axle we lift the whole container. We call this the container and it is powered in the following way. You can find instructions below in the video but the basic idea is that you rotate a gear wheel right here, the large gear wheel. We rotate the large gear wheel and we have a beam connected to the large gear wheel. And as we rotate the large gear wheel, we also move the beam and this lifts the whole container. So it's a very interesting mechanism and it's used in many different ways. And you can customize it for your own robots. So it works mainly with the large gear wheels because we have these holes on the large gear wheels that we can attach the axle. And with this mechanism we can lift, we can rotate, we can transfer power to different levers. Very interesting and we use it for this mission just to release the balls. I'll now move to the field and demonstrate how the whole solution works. We detect the color of the ball. It is red. We catch the ball and we lift it. We detect the next ball, the blue ball. Now it must detect the color, it is blue so we skip this ball. We now find the intersection and we wait here for the other robot. And I'll take the other robot. It is not turned on but as we move with this robot, this is the factory satellite. Our satellite will detect it and we'll release the container. And for the next video we'll prepare the container and we'll find a way to collect more than one of the balls. Let's look at some of the programming for this robot. This here is the program for the robot and it consists of a number of blocks that detect the object, follow the line, catch the object, move different positions, search the lines, skip ball, and it's not very complex. I'll get into more details in the next video. If you have any questions about the competition, leave them in the comments section below. Drop us an email and we'll be happy to answer.
Courses and lessons with this Tutorial
This Tutorial is used in the following courses and lessons
World Robotics Olympiad (WRO) 2014 Junior-High. Review of solutions with explanations
Videos for the World Robotics Olympiad 2014, Junior-High competition. We loved it because, let's be honest, it is about space, and don't we all love topics connected with space.
- 4
- 15:31
- 0
