How to align the wheels and how much should you push for this solution?
- #447
- 06 Mar 2017
- 2:25
- LEGO MINDSTORMS, LEGO MINDSTORMS EV3
- FIRST LEGO League, FIRST LEGO League 2016-2017 Animal Alias, Gears, EV3, FLL 2016, Construction, FLL, Classes with students
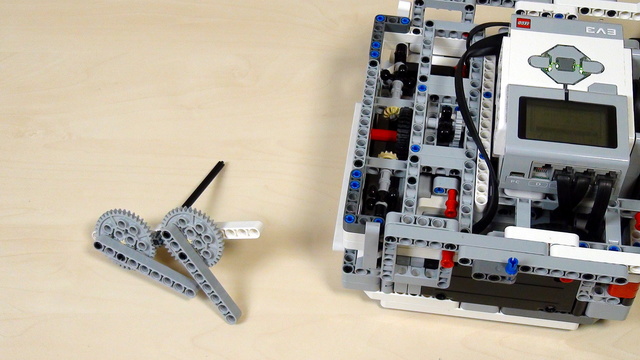
How to align the legs
If the legs are not aligned the whole mechanism will not work. You should first align the gears on each side of the robot to work in sync.
We could not reach a solution
We could not reach a stable solution with this gears and with the Box Robot Two. Fewer parts and one motor. Simplifying a robot. This was because the mechanism was working, but could not lift the robot to the desired height.
English
Short teacher note for using the gear wheels with 40 teeth for lifting the Box Robot. Using this system of gears it is first important to know how to align the two legs, so that they could actually work together. And the way you do it we have a bush right here, a yellow one, and we have the gear wheel. Then what I'll do is just rotate them to a maximum to the left let's say. And then I'll just fix with the gear and fix the bush. And this is something that you can use to help the students when they have problems with both legs not working together. And now you can see that they would work in sync. Because the other option is to have them like this, for example, where they are not aligned. And then you won't have the robot working because the two legs are not aligned. Most of the power will be on one of the legs. The other note for the teacher is that
when we experiment with this approach with the Box Robot we were not able to reach a stable solution. Why? Because it was working but it was working with lifting the robot only 5 Lego units. And for our robot we needed more, we needed like 13-14 Lego units. Here we reach only 5 Lego units. Now depending on your robot or if you are using the Box Robot you can try with this approach it will require some thinking, give the students half an hour or an hour or even a whole class to try to come up with a solution where using this approach they try to lift the robot. They'll be able to lift the robot but probably not hang the robot on the mission model.
Курсове и занятия включващи този Урок
Този Урок е използван в следните курсове и занятия.

FIRST LEGO League (FLL) 2016-2017 Animal Allies. Review of solutions with explanations
The course contains a number of sections with specific examples and tasks on how you could improve your FIRST LEGO League (FLL) robot game in order to achieve more points. It is designed mostly for after season teams that would like to prepare for next year, but could also work for teams that are currently working on their competition robots.
- 48
- 118:45
- 15
LARGE 40 teeths gear wheels for Lifting
Time to lift the robot. The first approach is by using the 40 teeth gear wheels that come with the LEGO Mindstorms EV3 and NXT robotics sets.
- 4
- 0
- 1
- 3d_rotation 0