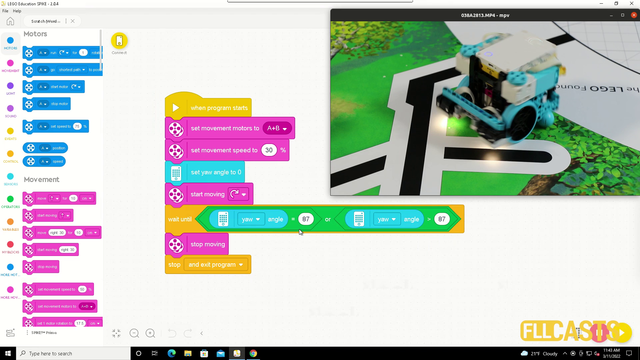
Accelerate and Decelerate with LEGO Education SPIKE Prime
In this video tutorial we look at Acceleration and Deceleration with a LEGO Education SPIKE Prime robot. The goal of the tutorial is to demonstrate the accuracy of the robot when we us default acceleration and slow acceleration.
- #1902
- 19 May 2022