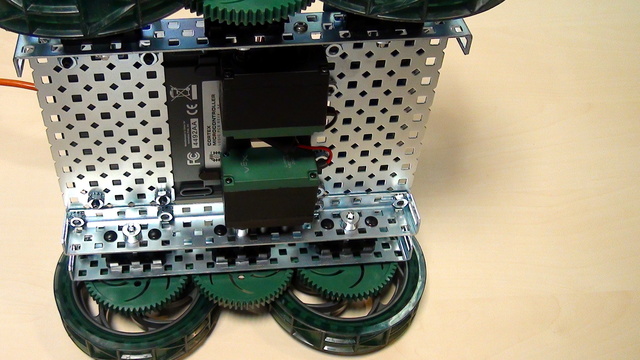

VEX EDR Intro. Connect VEX motors to the Cortex controller. Use the motor drivers/controllers.
Conenct the motors of the VEX EDR motor to the VEX Corted Controller. For connecting we need the motor drivers.
- #325
- 27 Feb 2017
Conenct the motors of the VEX EDR motor to the VEX Corted Controller. For connecting we need the motor drivers.

After we've download the software we must install it and most importantly configure it. Without propertly configuring the software it would be difficult to use the Cortex Controller.

There are basically three type of generations in the robotics game of life.
In this video tutorial we use the LEGO Education SPIKE Prime Motion Sensor to reach a mission model on the field. It's a basic use of the motion sensor that we will extend in the next few tutorials and in the same time we take the opportunity to demonstrate what a MyBlock is and how to develop one. As a result of this video you will learn how to make the program easier to read and maintain by organizing the blocks in the program in special MyBlocks that couple them all together.

One of the smartest things you could do in any software program is to extract logic in small reusable, simple, understandable units. In EV3-G these are called Blocks and we are going to extract the logic for finding a minimum and maximum for each of the sensors in a new block.

A common question is how to display arrays on the LEGO Mindstorms EV3 brick screen. Displaying values from an array is not different from any other display operation. In this tutorial, we would look at displaying two specific values. The minimum and the maximum for a specific sensor from the Advance Calibration Course Section

Following the Advanced Sensor Calibration course section, it is time to extract the logic for getting a calibrated value into a new block. This block will have an input and on this input, we give the port number. The block will return the calibrated value for this port number. We've built all the other blocks only because of this almost final video here.

Let's look at what game of life actually is, what are the rules and how to play the game on paper

Is it better to do fast turns or slow turns? Should you save some time by turning fast or should you be more precise by turning slow. Where is the balance? This video tutorial demonstrates exactly this for LEGO Education SPIKE Prime robot, their motion sensor and an ever occurring question on FIRST LEGO League competition which is how to find the balance and where is the balance.

In this video lesson, we will show you how to build a menu as a MyBlock in LEGO Mindstorms NXG-G. Having a menu is a must at robotics competitions since it saves time and gives easy access to program functionalities.

Now that we know how to make the robot move forward let's see we can make it move backward.

In this episode of the Basic NXT Programming series I will cover the sound sensor. I will explain how to program the sound sensor, stop on common problems faced, when the sound sensor is used and finally we will build a program that will allow us to control the robot's speed through the volume of the sound.
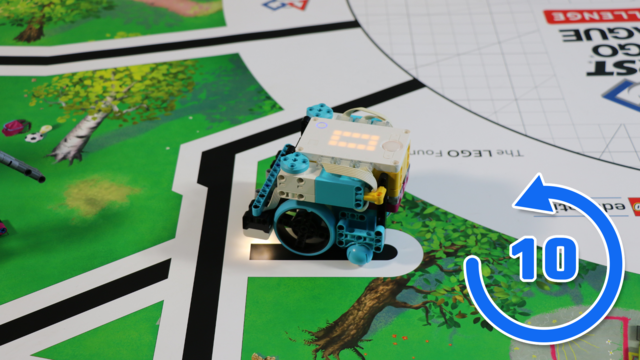
This LEGO Education SPIKE Prime video tutorial demonstrates the difference in turning slow and turning fast and using the Motion sensor to understand the orientation of the robot. We do 10 consecutive runs. The goal is to understand what can you expect from the robot behavior in terms of consistency.

With the set for the course, you also have an SD card. It is important that you understand why and how is the SD Card is used.

One of the interesting things in this sequence of videos is the program. The program detects when the system has reached the maximum speed and then stops the motor from rotating. We detect this with the EV3-G software

In this tutorial, we show you how to display all the values from an EV3-G array on the EV3 brick display. We are using an array Read Operation along with a loop. We are also detecting the loop counter and using it as an index to an array. It's basically the only viable way to do it. The process is commonly referred to as - "Iteration over an array" (although we still do not have an iterator in the programming language, we promise that one day we would do the super advance videos on "iteration" using the LEGO MINDSTORMS robots")

In the EV3-G software, you could use negative numbers for power and rotations. In this episode, we would look at what is the meaning of this numbers and make a few notes of where the teacher must be more careful.

With this video tutorial, we start with Turns with the VEX EDR robot.

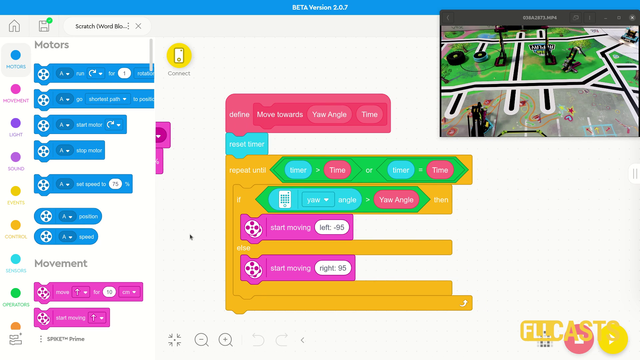
In this video tutorial we will reach a specific location on the field 10 times. This programs demonstrates the accuracy and consistency of a program that used the Motion Sensor to detect the angle at which the robot rotates. At the end of the tutorial you will have a visual and clear picture of what you could expect from this basic usage in terms of consistency and accuracy. This might be enough for some cases and it might not be enough for others.

In the RobotC software we could make the robot wait for a couple of seconds by using the wait function. This will give the motors a chance to work and this will actually move the robot.

In this tutorial, I will cover the adjustments of the display and the color lamp blocks from the LEGO Mindstorms NXT-G. Today I will show you how to use the color lamp in order to make your robot more interesting or how to display sensors values or try to draw something on the screen of the brick.

In this episode we combine in a single program the previous two programs for moving forward and backward.

We are ready to build the first program for moving the robot forward and backward. We learn how to build simple programs for moving the program. But it is not that easy...downloading to the robot does not always result in the robot moving.
To prepare the robot to move in a square and to use a loop in the program we would first make this VEX EDR robot move forward and turn, using a program developed with RobotC.

To control the VEX Cortex controller we must use a software. In this episode we would download the software from the VEX site. Strange thing is that you must select your region correctly even if you are not in this region

Spinning with the VEX EDR robot involves the use of both motors. The left and the right. Every robot with wheels could spin and this makes not exceptions.

Where is the math while turning? Is there any math involved? Should there be?