
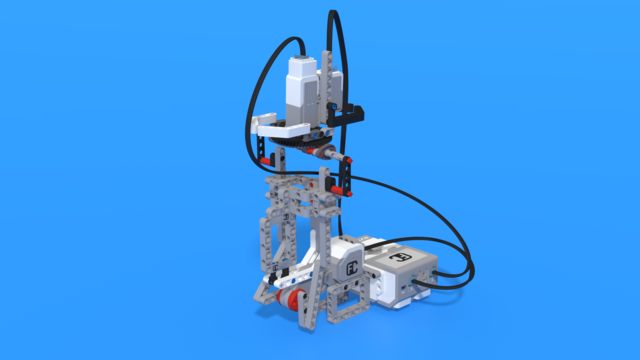
Catapult Full - Full catapult from LEGO Mindstorms with a Motor and a Touch Sensor
These are building instruction for a working automatic catapult with a motor and a touch sensor.
- #205
- 01 Feb 2015
- 1
These are building instruction for a working automatic catapult with a motor and a touch sensor.

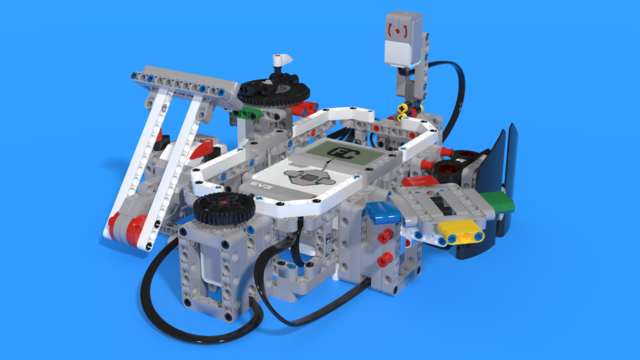
Building instructions for constructing a simple LEGO Model that has red, green, blue and yellow beams. This makes it perfect for operating robots through color code.

This is a LEGO Mindstorms Boxing robot. The inspiration story goes like this "One day we though - Let's play SUMO at this robotics demonstration, but let's make it more interesting. Let's play sumo with Humanoid Robots". We decided to build a boxing robot. The goal of the robot is to press the touch sensor on the other robot and it could be very fun. Perfect robot for demonstration. It is controlled by a joystick using the Bluetooth connection.
Here are the joystick and the programs for the joystick and the robots.

"You need to step on three points to be stable". This is something you could directly see after building this marvellous, 270+ steps, extremely interesting Motorcycle with a side cart. Yes, we are proud of it. The robot is suitable for using it at home. The instructions for building it contain more than 270+ steps so it is a test for endurance, concentration, passion. The same way driving a motorcycle is.
Or you could just step into the cart, drive along and enjoy the view while someone else is building the robot. Like a sibling or a parent.
Join the course A robot a "day" keeps the questions awake where we will further discuss the motorcycles, how to build them and what tasks to accomplish with them.

The GorillaBot walks on its two arms, using two large motors as forearms. It also has this awesome head, which actually is pretty useless as an ultrasonic sensor, unless you lift its eyebrows.

This module is meant to be used in EV3 Kinesthetic and Memory Game and is attached to the base of the robot. This module uses the gyro sensor to detect when it is hit, by observing the angular rate.

Calix comes from Latin, meaning cup.
Calix is a robot designed to carry small objects—like a cup—while autonomously following a black line. When most people think about robotics, they imagine machines helping with household chores. Calix is a simple example of that vision brought to life. You can place a cup on it in the kitchen, and it will deliver the cup to the end of the black line!
The robot is powered by two SPIKE Prime medium motors for movement, and it uses a color sensor to follow the line precisely. At the front, a large motor connected to a gear system lifts and lowers the cup, allowing for easy pickup and delivery.
Calix is an elegant demonstration of how even simple robots can be designed to perform useful tasks—making robotics more approachable and practical for everyday life.
Uylam is a robot that simulates a stormy environment for its ship. It is made using two piston-like mechanisms powered by a Large motor and offset by 90 degrees to create shaking similar to that of big waves. The ship itself is made out of a medium motor on a turntable and a gyro sensor attached to them. The purpose of this is to explore what is the best position of a ship compared to the waves, so that it sustains the least amount of shaking.

Instructions for building a LEGO truck. We use a medium motor for steering and a large motor for driving one of the rear wheels.

This module is meant to be used in EV3 Kinesthetic and Memory Game and is attached to the base of the robot. This module uses the rotary sensor, embedded in every motor, to detect when the player has pulled the lever.

Cápa means shark in Hungarian.
The robot resembles a live hammershark. It uses a medium motor to move its tail, which is used for the shark to turn. It moves forward with a large motor and two tyres. Its jaws open and close with a second large motor. The two touch sensors at the front are purely for aesthetics but you can use them if you like. Finally the head has an ultrasonic sensor which detects if something is a potential "prey". This resembles the real hammer sharks' ability to sense with their "hammer".

Building instructions for LEGO EV3 catching robot. It uses a medium motor to drive system of gears, which is used for catching objects. It, also, has an ultrasonic and colour sensors for detecting the objects.

Building instructions for a simple car using an EV3 Large motor for turning the front wheels and EV3 medium motor with differential for driving the rear wheels.

"Bot. Spy Bot."
Many of us are fascinated by the idea of spies. Movies for "spies" are also very popular and if you haven't watched them check out the 007 movies. These here are building instructions for a LEGO Mindstorms robot with two touch sensors and one ultrasonic. It could be used as a spy - sneaking closer to you and detecting if you move or if you touch it. The whole idea for this robot came from NXT when there were sound sensors. Currently, there are no sound sensors in the EV3 set, but the robot could again be quite fun to program.

It moves and it collects. It collects objects.
These are building instructions for a LEGO Mindstorms robot that could collect objects. It is not actually catching them and that's why we call it "Simple Catch Bot". The general case is to program it to move on the floor and collect some of the Mindstorms wheels and tires coming with the 45544, 45560 or 31313 LEGO sets.
The kinesthetic and memory game works with a program you can download from here. In these instructions you will see the 7 modules from which it is built:
This robot is meant to be very modular and to enable its owner to upgrade it and modify it.

The robot uses two Large Mindstorms EV3 Motors to open and close its shell. On the top of the shell are used four hoses, that can be reshaped to form different shell styles. It also uses two black bent beams for eyebrows, that can be moved to change the expression of the clam. A Castor Ball is used to represent its pearl.

This is a garbage container—and it’s fun! Like most real garbage containers, it has only three wheels because one is missing. You’ll also notice that one of the wheels is slightly different and tilted to the side—just like the real thing.
The container is great for play and for storing small items inside.
Suitable for children aged 6–10. Build the garbage container and leave it out for a week—children will naturally engage with it and are likely to spend at least an hour playing with it over the course of the week.

This module is meant to be used in EV3 Kinesthetic and Memory Game and is attached to the base of the robot. This module uses the ultrasonic sensor to detect the hands of the player. Attention must be paid to where the module is attached since it can be activated by accident if the player reaches for another module over this one.

This is version 2 of the LEGO Mindstorms Grabber. It makes use of 4 gears to make both levers active.