

WRO Elementary 2015. Field Run. Part 1
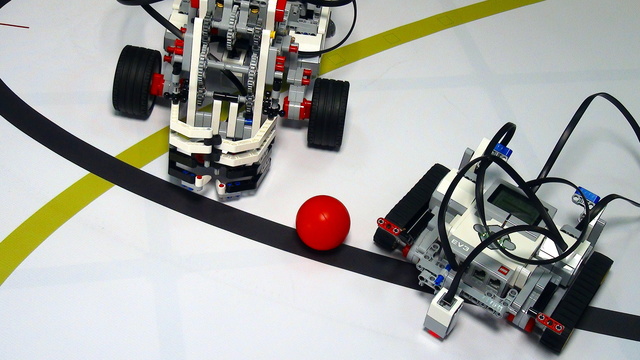
This is the final run for our World Robotics Olympiad (WRO) 2015 Elementary Challenge Robot. In "dives", detects the color of the pearl and then counts the number of Ping-Pong balls to release.
- #191
- 19 Dec 2015
This is the final run for our World Robotics Olympiad (WRO) 2015 Elementary Challenge Robot. In "dives", detects the color of the pearl and then counts the number of Ping-Pong balls to release.

A robot that contains balls and releases them. It counts how many balls to release depending on the "treasures" it has hunted on the field. This is part of the World Robotics Olympiad 2015 Elementary challenge.
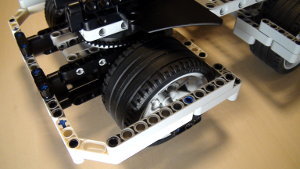
We continue from part 4 where we made a controlled experiment to transfer power from a Mindstorms motor to the rear wheels. The construction was too complex and inefficient and in this video lesson we are improving it by lowering the differential and removing all gear wheels from this LEGO Mindstorms EV3 Competition robot.

In the final video we explore how to trigger the release of the attachment with just a rubber band. The release is triggered with a gear wheel that rotates in a specific way. This saves speed, does not require additional LEGO Mindstorms motor and is precise enough for a competition.

The LEGO EV3 Mindstorms brick can be programmed from the brick itself. The motors can be moved forward/backward and even simple programs could be implemented without even touching the EV3-G software at the computer

Go to the missions model. Do the missions. You can then continue to the next mission or wait a few seconds at this FIRST LEGO League 2015 Trash Trek mission model and receive a few more points. Isn't it interesting. The ELM team has build a LEGO Mindstorms attachment for this robot. Let's see how it works.

Accomplishing many tasks with a single attachment for the FIRST LEGO League (FLL) 2013 competition. The attachments are using many rubber bands. What is interesting is that it collects/lift/triggers many things at the same time. This is how you could save time and parts during a competition.

This video discusses the fact the robot requires a few more parts that are available in the LEGO Mindstorms EV3 robotics sets. We have a number of other constructions that require less parts, but for this particular robot construction we have decided to go beyond the standard sets, cheaply buy a few more parts and build a whole box robot with them.

In this video tutorial we experiment with different ways of solving the sports mission for throwing the ball. We show seven different LEGO MIndstorms EV3 and NXT robot constructions and attachements. Most of the techniques could be applied for any mission involving throwing a ball or an object.

"The devil is in the details". We are improving the Rubber band attachment with a Flywheel by introducing a few small, but important modifications that make the whole robot attachment more stable and reliable. With the conclusion of the series this attachment could be used as a basis for some very interesting STEM demonstrations on energy accumulation and conservation.
Starting with the World Robotics Olympiad 2014 Junior-High challenge we first catch the object on our path. We discuss a good mechanism for catching and lifting balls that can do two movements with one motor.

Introducing three main concepts - Energy, Inertia Moment and Angular Velocity. We describe what is the moment of Inertia, how do we calculate it and how do we measure it?
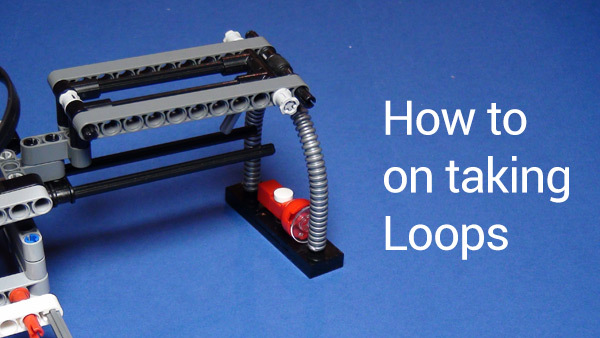
Each year the FIRST LEGO League robotics Competition involves loops. In this video tutorial I will go through the most common way of taking loops, show its disadvantages and suggest another way to do it.

Five different robot chassis. This is the goal of the series. To present ideas for different design of the robots and especially the robot bases. If the base is stable and balanced, then in could easily be extended. Let's start with the most simple of the five.

In this video tutorial we will show you three ways for making your robot stable on the field. We will present each one of them with their advantages and disadvantages - it's up to you to choose which one is the best for your case.

In this episode, we introduce a LEGO Mindstorms EV3 version of competition robot construction. It is a modular construction, with medium motor for additional attachments and two light or colour sensors for orientating on the field.

You need to pull. And also catch. You need a carabiner. We have done a number of videos on carabiners and this is one of the ideas for the FIRST LEGO League 2015 Trash Trek competition.

Part four of the Catapult series is again about loading the catapult automatically but this time using EV3 brick, motor and sensor. We use a gear system with a medium complexity along with a "standard clutch" available in the LEGO Mindstorms EV3 kits. As a result, at the end of the video, the Catapult loads and fires automatically.

Let's try to integrate more of the things we have learned into a single attachment. One that could accumulate energy, conserve it and use it at the appropriate time. All this because of a Rubber Band and a Flywheel - and if you don't know what a flywheel is you should definitely watch this videos

Based on your feedback we've build a course for introducing new students to the LEGO Mindstorms EV3 programming and construction. It is designed for school groups, competition teams and students alone in home that can get our feedback on their progress

Rubber bands can be quite powerful. Based on several requests from you we are starting a series on using the LEGO Rubber bands available in the Mindstorms set.