The goal of this lesson is for students to exercise with the ultrasonic sensor along with controlling the middle motor. It is important to not the many ways in which gear wheels are used in the robot.

To access the full video please subscribe to FLLCasts.com
- #1417
- 08 Aug 2019
The robot could be complex for students to construct. You can note this to them and warn them that if they spend too much time on the construction they won't have enough time for the tasks.
If some of the students have spend a lot of time constructing the robot they will probably have enough time only for the first initial tasks. These tasks are not so important for the lesson, but they contain everything that the lesson is about.
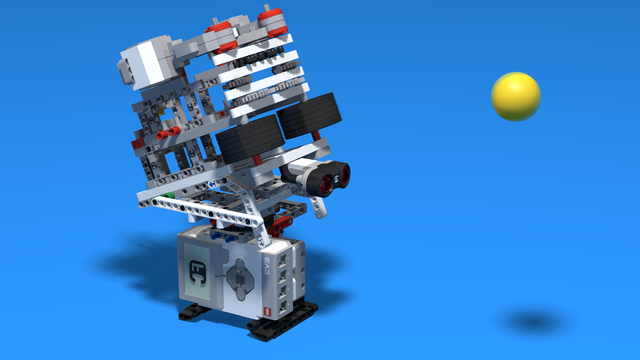
After the initial tasks the rest of the tasks are more like an explanation of the lesson. For the first few tasks the robot must rotate to 45 degrees. In the program we have set the motor to rotate to 105 degrees. It would be useful to explain to students that this is because of the gear wheels and the ratio between them that is "56:24". If we multiply 56/24 by 45 we get 105 degrees, eg - 56/24*45=105. Because the gear wheels transmission is constructed for power, the tower is rotating to fewer degrees than the motor is rotating to. If you think the students are not ready for this calculation you can let them reach the solution with trial and error.
After that students should program the check if something is in front of the robot and if so the robot must shoot. We have programed just 5 rotations forward, but you can change this if needed. For more advanced students you can challenge them by setting the task to shoot at something that is at least 60 cm / 25 in close to the robot.

Courses and lessons with this Tutorial
This Tutorial is used in the following courses and lessons
Level B2. "Military Technologies". Robotics with LEGO
The firfth level of the Robotics with LEGO curriculum for students in second, third or fourth grades.
The students build many robots with chain-treads. The Color Sensor is introduced and robots use it to recognize the colors of the objects around them. Students learn about gears, basic gear constructions, and their application. Robots now can stop on a black line and can follow a line using their sensor.
- 37
- 6:37
- 111
Lesson 5 - Shooting Balls
Remember to provide feedback to students regularly. It's important to give structured feedback in the form of a grade. Today, you'll need to grade your students following this article.
- 5
- 3
- 10
- 3d_rotation 1