In this video tutorial we take a look at the consistency of a robot that uses acceleration and deceleration to turn precisely. We use the motion sensor. In 10 consecutive runs we demonstrate what could you expect from the robot when it comes to consistency.
- #1928
- 09 Jun 2022
- 2:03
- LEGO Education SPIKE Prime
- 10 out of 10, LEGO Education SPIKE App Word Blocks 2, Scratch, Programming, Motion Sensor, Acceleration
English
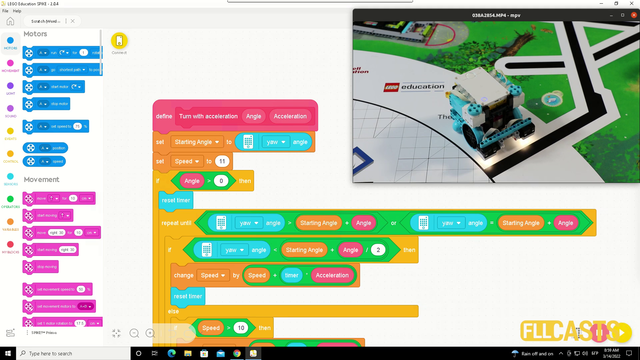
In this video tutorial, we will do ten consecutive runs with the LEGO Education SPIKE Prime Robot and explore how accurate our program with acceleration and motion sensor is. Can we be consistent with the robot behavior? The goal of this ten consecutive runs is to see how consistent the robot could be. First, you can watch the back wheel. There is a wheel at the back of the road that's on the left and you can see that it arrives almost every time exactly at the same location. So what this program does is it moves the robot and it tries to rotate to about 90 degrees and rotate to 90 degrees. It accelerates in the first 45 and then decelerates in the next 45. So this acceleration and deceleration prevents the robot and its wheels for slipping on the map. And in this way we have a pretty consistent behavior for the robot. You can see that almost every time the robot is at the same location. This is one of the tools that we like to use the most. This block with acceleration. You can copy paste it, you can take it for all your programs. But this block has brought us a lot of consistency in different programs when we try to accomplish different FIRST LEGO League missions. You can check out the previous tutorial with the explanation of how exactly we programmed the robot, and as an end result, I could say that we have a pretty consistent behavior of the robot.
Courses and lessons with this Tutorial
This Tutorial is used in the following courses and lessons

LEGO Education SPIKE Prime Programming for Competitions with Word Blocks
Two fundamental concepts are essential for robotics competitions: ensuring the robot consistently navigates and positions itself accurately on the field and designing attachments that complete missions once the robot reaches its target. This course focuses on the first aspect - precise navigation and positioning - while the second is covered across the entire FLLCasts platform, starting with the FIRST LEGO League with LEGO Education SPIKE Prime. "Challenge" competition for 9-16 years old
The goal of this course is to help you learn how to program LEGO Education SPIKE Prime robots to operate consistently and reliably in competition settings. We use LEGO Education SPIKE App Word Blocks, a Scratch-based programming language, to teach key techniques applicable to FIRST LEGO League and World Robot Olympiad competitions. Topics covered include different methods for line following, such as fast, slow, smooth, and using multiple states, as well as techniques for line alignment, double alignment, and maintaining a straight path using the motion sensor.
- 40
- 188:21
- 19
Motion Sensor - precise turn with acceleration
In this video tutorial we explore acceleration and deceleration and how to make the robot turn precisely by using acceleration and deceleration. The goal is for us to demonstrate a program that turns the robot to 90 degree. In the first 45 the robot is accelerating and in the second 45 it is decelerating.
- 2
- 0
- 1
- 3d_rotation 1