Without the use of the sensors, make sure that you are at least using "set movement acceleration to slow". In this tutorial we will demonstrate why and how this helps us improve the accuracy and consistency of the robot.
- #1960
- 01 Jan 2022
- 4:23
- LEGO MINDSTORMS Robot Inventor
- FIRST LEGO League, World Robot Olympiad, Scratch, LEGO MINDSTORMS App Word Blocks, Acceleration
We will do a couple of run with slow and fast acceleration for a more complex movement. We hope this gives you a sense of what could you expect from the robots.
English
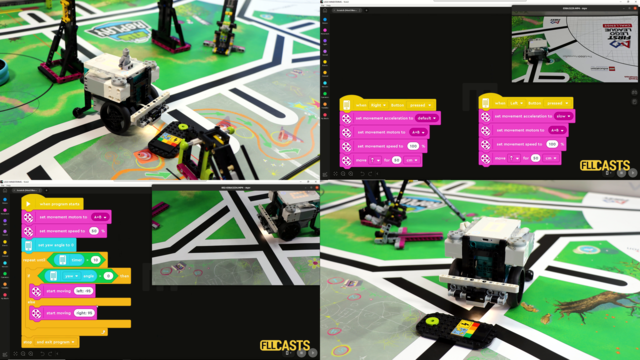
Here is the challenge now: without the use of any sensors let's explore if it is possible to reach this mission model on this FIRST LEGO League Replay competition field from the base to the mission model without the use of sensors and just using blocks for movement acceleration and deceleration. The goal is to see how accurate this could be. We start the robot from base. Move, turn. Move, turn. This is a program without any sensors. This is just a program with blocks for movement for the LEGO MINDSTORMS Robot Inventor. And you see where we arrived in the first run. We should have reached the phone but something else happened like the robot the robot went into a different direction. It hit this tire there the wheel. So it is not particularly accurate. Let's try for a second time. We are careful to start the robot from the same place, move forward. And now it kind of gets there, which is okay. And from here it can approach the poll. Let's explore the program. This here is the program on the left. When the program starts we set movement motors to A+B movement speed to 50% and we set the acceleration to slow because slow acceleration will give us the best result. Just open this to see it in full screen now then we continue. We move forward, we rotate. We move forward, we rotate, we move forward, we rotate, we move forward let's see all the blocks. We move forward, we rotate here. Currently we are in the rotate for four 5 cm. Then we move forward for 30. We are right here. Then we rotate. We just executed this block. Then we move forward for 90 cm. During these 90 cm you can see that the rock went slightly to the right and the second time it didn't. Then we try to turn for 8 cm, then we move forward for 50 cm. That's it. That's the whole program. And because the acceleration is slow we get a rather good no, it's not a good accuracy but that's the best we can do without the use of sensors. Let me put it this way yes, that's a nice way to put it. Without the use of the sensors we should use "movement acceleration to slow" in order to get to a point where the robot is as precise as you see. So it kind of gets there to the mission model. And from here we can approach this mission model or this mission model. The goal is to get somewhere right here. So it's okay, it's okay. And in the ten out of ten out of ten we will explore how accurate if we run it like ten times. But here the point is when you cannot use the sensors for any reason probably the students are still too young, or just the first program at least try to use set movement acceleration to slow and try to move with speed at about 50%. Download the program, experiment with this program. See what happens once you have different versions of the acceleration and different values and see how accurate the robot is. Hope this is helpful. See you in the next tutorial. You.
Courses and lessons with this Tutorial
This Tutorial is used in the following courses and lessons
LEGO MINDSTORMS Robot Inventor Programming for competition with Word Blocks
To successfully advance at competitions we need to understand two concepts - how to reliably and consistently navigate the field and position the robot exactly where we need it to be on every run, and how to build attachments that would accomplish a mission model once we have reached it. This course is focused on the first part. The second part is the whole FLLCasts platform, but start at FIRST LEGO League with LEGO Mindstorms Robot Inventor. "Challenge" competition for 9-16 years old.
The goal of this course is to help you learn to program LEGO Robots using Scratch and make them behave consistently and reliably during competitions. As a language we use LEGO MINDSTORMS App Word Blocks which is based on Scratch. We look at a lot of concepts that could be used for FIRST LEGO League and World Robot Olympiad competitions - for example, how to follow a line fast, slow, in a smooth way, with 5 states. Also, how to align to lines, how to do double align, how to keep a straight line with a motion sensor.
Unfortunately, LEGO discontinued the robot series during the making of this course which is why it's kind of shortish. You could use the SPIKE Prime course for a more in-depth analysis.
- 8
- 38:50
- 5

Moving without sensors - long path
Without the use of the sensors, make sure that you are at least using "set movement acceleration to slow". In this tutorial we will demonstrate why and how this helps us improve the accuracy and consistency of the robot.
- 2
- 0
- 1
- 3d_rotation 1
LEGO MINDSTORMS Robot Inventor Programming for competition with Word Blocks
To successfully advance at competitions we need to understand two concepts - how to reliably and consistently navigate the field and position the robot exactly where we need it to be on every run, and how to build attachments that would accomplish a mission model once we have reached it. This course is focused on the first part. The second part is the whole FLLCasts platform, but start at FIRST LEGO League with LEGO Mindstorms Robot Inventor. "Challenge" competition for 9-16 years old.
The goal of this course is to help you learn to program LEGO Robots using Scratch and make them behave consistently and reliably during competitions. As a language we use LEGO MINDSTORMS App Word Blocks which is based on Scratch. We look at a lot of concepts that could be used for FIRST LEGO League and World Robot Olympiad competitions - for example, how to follow a line fast, slow, in a smooth way, with 5 states. Also, how to align to lines, how to do double align, how to keep a straight line with a motion sensor.
Unfortunately, LEGO discontinued the robot series during the making of this course which is why it's kind of shortish. You could use the SPIKE Prime course for a more in-depth analysis.
- 8
- 38:50
- 5
Moving without sensors - long path
Without the use of the sensors, make sure that you are at least using "set movement acceleration to slow". In this tutorial we will demonstrate why and how this helps us improve the accuracy and consistency of the robot.
- 2
- 0
- 1
- 3d_rotation 1