We will show you the most reliable way to turn with your robot.
- #418
- 22 Apr 2017
- 2:49
What is a pivot turn
The most reliable way to turn with a robot is the pivot turn when only one motor moves.
Interestingly enough, in order to turn to the left, we must move only the right wheel.
And vice versa, for a right turn, we move the left wheel.
To achieve that, we will use а Large motor block.
Large motor block in the EV3 Software
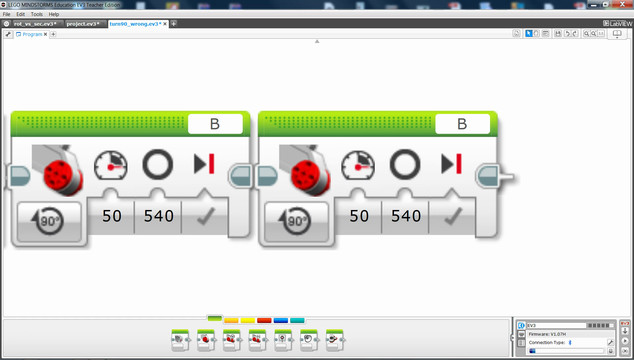
In the green action palette, find the Large motor block. Carefully check the port of the motor, as the selected port is D by default and our motors are connected to ports B and C.

English
In this video we'll look at how the robot does a pivot turn and goes to the other room to take our cup of water.
The most reliable way to turn to the side of the robot either the left side or the right side and this is my right and my left is to use a pivot turn where only one of the wheels is rotating. If I just with my hand catch one of the wheels and move the other, you can see that the robot is turning right. Then I'll just block the left wheel and move the right and the robot is turning left. If I move the left wheel, the robot is turning right. If I move the right wheel, the robot is turning left. And that's a very reliable way of turning. For this turning we'll use the large block. Of course, we can use the other blocks in the software and we an achieve the same thing but our recommendation is to always use the large block for pivot turns. Let's go to the program and see how we do this turn. I'll just move forward with the tank block for let's say 2 rotations and then we use the large motor block and we have this blcok in the actions pallet - Large Motor block. And we say: Okay, we want to do 1 rotation with motor B. And we want this rotation to be with the power of 50. Probably this will be okay but we just have to check. And after we rotate for 1 rotation with motor B then again we move forward with the tank block. And this block here - the Large Motor block will make the robot pivot and it will turn to the right because motor B on our robot is the left motor.
Let me start it again so that you can see it on the camera. The robot moves forward,
it turns but it does not turn exactly to the right. It just turns slightly to the right. And in the next video we'll try to improve this program to make the robot turn exactly to the right.
Courses and lessons with this Tutorial
This Tutorial is used in the following courses and lessons

EV3 Phi. Introduction to robotics with LEGO Mindstorms
The things that you will be able to do with your EV3 robot by the end of this course are:
Freely move your robot towards desired target;
Avoid obstacles on the path of your robot using sensors;
Follow lines of any shape;
Detecting and picking up objects of any kind;
- 92
- 220:20
- 36

Turning with a LEGO Mindstorms Robot
So far we know how to make a turn in an arc, just like the real cars do.
Today we will see what other options our robots have for turning.
- 14
- 0
- 4
- 3d_rotation 0

Instructors Remote Training
If you are working with students and you want to introduce Robotics to your class or you want to mentor a FLL team, but you are insecure about your technical knowledge in the Robotics field, then this is the right place for you. Having in mind teachers' busy schedule, we have design two different schedules and added an option to design one just for you. FLLCasts's Mindstorms EV3 Robotics Online Training is the perfect match for any teacher.
After the completion of each task the participant has to upload his solution for verification.
- 183
- 280:11
- 156
How to make the robot move
Let's review the LEGO Mindstorms EV3 Intelligent Brick
The EV3 brick is the main computer of your LEGO robot and it has a display, a few buttons and various ports.
- 24
- 0
- 11
- 3d_rotation 0

Robotics with LEGO - Level 1.0 - Adventure in Space
The first level of the Robotics with LEGO curriculum for students in fifth to twelfth grades.
Various constructions with robots are built. Learn how to control the motors so that the robot navigates around the Moon and Earth in various ways. Getting to know the first two sensors. The robot can feel its surroundings with the help of the Touch sensor and avoid obstacles.
The Ultrasonic distance sensor can help the robot avoid obstacles. Students work with concepts like loop, degrees and medium motor. Robots can now do two different actions at the same time - while solving missions on a field, the third motor clears detected obstacles.
- 126
- 123:52
- 150
Lesson 3 - Clearing the landing zone
Intro
Today we are building a robot, what would automatically clear the landing site.
Before a space craft lands on the moon, you send a robot to clear the landing site. Your robot has landed on the Moon and its task is to clear the site and to prepare it for the landing of the bigger space ship.
The robot lands slightly further away from the site and it must find its way to it. Regretably it road is blocked by rocks that can not be moved. The robot must go around them.

- 9
- 4
- 2
- 3d_rotation 0

Level Y. The Younglings (Pre-release)
The absolute starter. A new course book for students that are first grade (7-8 year old). If a student is to young to join the 8-10 years curriculum this is the place where he/she should start.
The course book contains a number of well structured 2-hourse classes for the youngest students that we've ever managed to productively include in a LEGO Mindstorms EV3 Robotics courses, groups and classes.
(Course book available only in Bulgarian and will soon be translated)
- 14
- 2:49
- 102

Level A1. Introduction. Robotics with LEGO
Introduction to robotics - The first level of the Robotics with LEGO curriculum for students in second, third or fourth grades. A journey in space, with robots. Various constructions with robots are built. Learn how to control the motors so that the robot navigates around the Sun, the Moon and Earth in various ways. Getting to know the first of the sensors. The robot can feel its surroundings with the help of the Touch sensor and avoid obstacles.
- 142
- 133:42
- 187
Lesson 5 - Clearing a landing spot
Remember to provide feedback to students regularly. It's important to give structured feedback in the form of a grade. Today, you'll need to grade your students following this article.
- 11
- 3
- 5
- 3d_rotation 0