

Gapped & Crossed Line Following. Part 12. Escape the "Lost" state
The final video from the course. The robot escapes the state where it is lost. This happens if it can not continue in any direction.
- #215
- 08 Feb 2016
The final video from the course. The robot escapes the state where it is lost. This happens if it can not continue in any direction.

Based on your feedback we have decided to show you the live process of building a complex LEGO Mindstorms EV3 Competition robot without having the whole robot ready yet. We are continuing from part 2 where we finished the 'front' of the robot and now we will extend it so that we could also attach the rear part.

Note for the teacher on how to organize the class to use different robot base constructions to accomplish the mission for lifting.

Many times we just upload blocks and leave it up to you to use it. In this tutorial, I would like to show you how to use the implemented blocks. How to import them into the EV3-G software. How to see them in the palette. How to drag and drop them to build a working program.

In this tutorial we will go through a solution for three of the missions from 2012 FIRST LEGO League competition using only one attachment. By accomplishing the medicines, strength exercise and cardiovascular missions we earn 55 points. You can download the programs from the link in the Materials tab.
One of the very common problems with the LEGO Mindstorms and LEGO Technic Gear wheels is then a tooth is skipped. In this video, I would like us to discuss this challenge and how do we solve it.

How to organize the different robots and group of students when working on lifting the robot.

Taking/Grabbing loops is one of the most common mission types at robotics competitions like FIRST LEGO League/World Robotics Olympiad. This tutorial is about an attachment that grabs the loop. The attachment uses Luly, a small LEGO Education SPIKE Prime competition robot with 3D building instructions as a robot base.

This tutorial shows how quick pinless attachment collects loops. Such attachments are popular at the FIRST LEGO League competition. The attachment uses Luly, a small LEGO Education SPIKE Prime competition robot with 3D building instructions as a robot base.

With this video tutorial we start the course for LEGO MINDSTORMS Robot Inventor and how to successfully program the robot for FIRST LEGO League robotics competition. It is good to have SPIKE Prime or EV3 for the competition. But if you happen to have Robot Inventor, don't be discourage. It is still possible to participate and accomplish a lot with the set.

Remember the passive/active attachment separation that we are making at FLLCasts.com. This applies for all the attachments and in this Episode, we are looking at how to use a passive attachment.

In this video we are solving part of the FIRST LEGO League Senior Solutions challange missions (FLL 2012) using LEGO Mindstorms NXT robots. I make a step by step explanation of each move I make. The goal of this video is to help you with ideas and suggestions on how one should look at the missions.

In this video tutorial we would look at the mission run for M06. SPACE STATION MODULES. The missions is to precisely push a mission model into an opening. In almost any FIRST LEGO League competition there are such missions. The tutorial contains only the mission run on the field. We accomplish a single mission.

This quick pinless attachment is designed for collecting parts by pushing them. It shows the principle of putting a robot of an attachment in a very fast manner. Such attachments are popular at the FIRST LEGO League competition. The attachment uses Luly, a small LEGO Education SPIKE Prime competition robot with 3D building instructions as a robot base.

Using the rack depends on the experience of the team. Based on this a different number of gear wheels and racks would be used.

How great is the great attachment for lifting that we built in this course? How many times can it lift the robot without making an error? How great are your attachments and how could you test them? - the answer is simple. Just try 10 times and they should work at least 9 of them as our attachment is.

"Array initialization" is the first step in every program that involves Arrays. This applies to most programming languages and for EV3-G it is a must.
In this tutorial, we would show you how to initialize the array and how to extract this logic in a new block

It this episode we would present you with our attachment for lifting the robot.

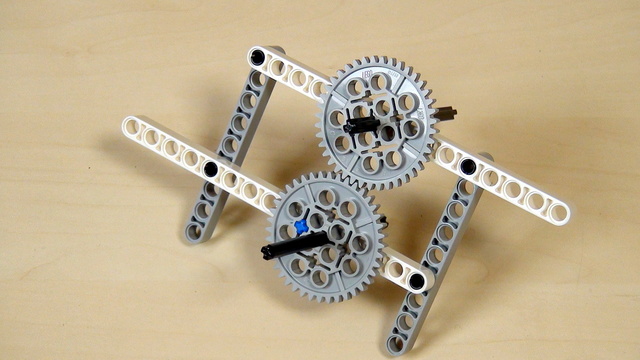
Here is our solution for preventing torsion and bending of the LEGO Mindstorms EV3 axles.

Before moving forward here is the simple task of building the mechanism and extending the legs. Extend the legs to fifteen LEGO units.

How to align the wheels and how much should you push for this solution?

This animation demonstrates a vertical lift attachment. This is an attachment that transfer a circular motion from the motors to a linear motion and is a very powerful concept. We demonstrate it with a LEGO MINDSTORMS Robot Inventor robot build from 51515 set. This is arguably one of the most complex attachments in this course.

This video tutorial contains a detailed explanation on how we accomplish the FIRST LEGO League 2018-2019 Into Orbit mission called M04. CRATER CROSSING. These are some of the funniest missions at this robotics competition. Try to move over an obstacle with a robot and if you manage to return back to base without bumping into other mission models that would be great.

There were a few problems with the 40 teeth gears that we were using. Let's list some of them

Building a rack is a very important skill during competitions. You should try to build one, learn how to use it and have it as a tool for you next robots. But for this particular BoxRobot, we will not continue with a rack.

The most stressed wheel in our system is the driven wheel. We've already fixed the problem with the driving wheel of the scissor mechanism and now it is time to look at the drive LEGO Mindstorms wheel.

The M08. AEROBIC EXERCISE is one of the very common types of mission in FIRST LEGO League robotics competitions. I think this pattern of missions was first introduced with the growing abilities of the participating students that were constantly reaching the maximum number of points. So the competition introduced mission that require a lot of time - 20-30 seconds, are time consuming and are complex. They requires a lot of moves. This here is a video tutorial on how it could be accomplished