In this video tutorial we are demonstrating the impact of slow and fast acceleration on the robot. In the Scratch program there is an acceleration block for fast and slow acceleration. The robot behaves in different way. Let's explore them so that you know what to use for FIRST LEGO League competitions.
- #1959
- 31 Oct 2022
- 3:40
- LEGO MINDSTORMS Robot Inventor
- Inertia, FIRST LEGO League, World Robot Olympiad, Scratch, LEGO MINDSTORMS App Word Blocks
English
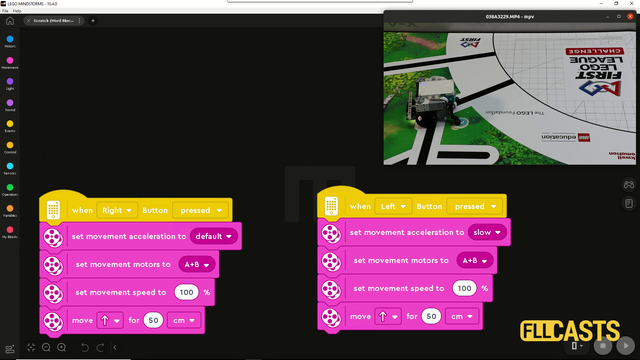
The next tutorial of our Robot Inventor programming course is a game to move with the robot. This time we will try to improve the accuracy of the robot by using the blocks for acceleration and deceleration and let's see what the impact of these blocks on the behavior of our robot. When the left button is pressed we use the block for acceleration and deceleration and when the right button is pressed we use the default acceleration deceleration so the left button is slow while the right button is default and you can see the different behavior of the robot is the same power in both places but the robot behaves in a different way and you can see that when the acceleration is slower the robot is more consistent. Is more reliable. When we accelerate by default, this is what happens. There is some inertia, we sleep, we arrive at a different place but when we accelerate slow we are more consistent. Let's go to the program. This here is the program for our robot and we are using the set movement acceleration to block. So this is a block that we can use before or after set movement modules to A and B. We set movement acceleration to default and we have the options for pass balance move slow, very slow and you can see that probably pass is the fastest and balance is faster than smooth very slow is the slowest. Now you should experiment and the behavior of the robot is what we should analyze here. When we have default acceleration you can see that the robot behaves in one way but when the acceleration is slow it's another way. So press left button. Let's see again when you press the left button this is the left button of the robot. This is how the robot behaves when the acceleration is slow we are moving forward for about 50 cm. Then when the acceleration is passed, this is what happens.
We saw how at the end we almost find it difficult stop whenever there is a change the acceleration is default and I don't know what the fault is but it doesn't matter, it's not a specific value, it's the behavior that we are looking for and this is again the problem is split into two parts in order for us to experiment and demonstrate. What you should do now is download this problem and try to replicate the behavior of the world and try to see how the robot behaves when the acceleration is slow and when it's fast and try to reach the other end of the field with slow and with fast acceleration and it will be a worthwhile exercise because you can see the actual behavior after all. Thanks for watching, see you in the next tutorial.
Courses and lessons with this Tutorial
This Tutorial is used in the following courses and lessons
LEGO MINDSTORMS Robot Inventor Programming for competition with Word Blocks
To successfully advance at competitions we need to understand two concepts - how to reliably and consistently navigate the field and position the robot exactly where we need it to be on every run, and how to build attachments that would accomplish a mission model once we have reached it. This course is focused on the first part. The second part is the whole FLLCasts platform, but start at FIRST LEGO League with LEGO Mindstorms Robot Inventor. "Challenge" competition for 9-16 years old.
The goal of this course is to help you learn to program LEGO Robots using Scratch and make them behave consistently and reliably during competitions. As a language we use LEGO MINDSTORMS App Word Blocks which is based on Scratch. We look at a lot of concepts that could be used for FIRST LEGO League and World Robot Olympiad competitions - for example, how to follow a line fast, slow, in a smooth way, with 5 states. Also, how to align to lines, how to do double align, how to keep a straight line with a motion sensor.
Unfortunately, LEGO discontinued the robot series during the making of this course which is why it's kind of shortish. You could use the SPIKE Prime course for a more in-depth analysis.
- 8
- 38:50
- 5
Accelerate and Decelerate to improve accuracy
In this video tutorial we are demonstrating the impact of slow and fast acceleration on the robot. In the Scratch program there is an acceleration block for fast and slow acceleration. The robot behaves in different way. Let's explore them so that you know what to use for FIRST LEGO League competitions.
- 1
- 0
- 1
- 3d_rotation 1