
How to play football with LEGO Mindstorms Robots. Introduction
Football with robots could be quite fun. Football with LEGO Mindstorms robots is one of the popular categories for competitions with LEGO Mindstorms Robots.
- #945
- 20 Sep 2018
"I came to browse the Internet and build robots. And I am done browsing the Internet". Many different approaches, principles and directions to constructing robots with detailed building instructions and pictures.
Football with robots could be quite fun. Football with LEGO Mindstorms robots is one of the popular categories for competitions with LEGO Mindstorms Robots.


Cable management is very important on each competition. Cables could get in the way of attachments, levers, different wheels and so on. Brick accessibility is also very important. Do not forget that the brick should be charged from time to time and that you should also be able to access the buttons.

Here we start with a second box robot that we would like to build. It is in a way improvement to the first robot and we would take a look at its features.

One more example for an active attachment with a system of gear wheels. This time the system is constructed so that the attachment could lift heavy objects.

This is a third example for adding an active attachment. This third attachment is now connected to the wheel at the front of the robot. Again, the attachment could be easily extended.

Second active pinless attachment for the robot construction. It is placed in the top/right corner of the robot and includes an interesting gear system for transferring the power. The attachment is suitable for complete rotations.

This is the first Active Pinless Attachment for the Box competition robot. The attachment is placed on the top of the robot and is controlled by one of the motors.

Without the use of any motor, you can still accomplish a number of missions using passive attachments. You can still pull/push on different levers using only a beam or two connected to the frame.

We should how to build a frame that could hold the attachments for specific competition missions. This frame is added in a pinless manner. This means very fast and easy without any glitches of the pins.

In this video we discuss how do we transfer power from the motors that are "inside the robot box" to the gear wheels that are "outside the robot box".

In this episode we look at the way this robot is balanced. A well-balanced robot could handle heavier attachments without losing track of its position on the robotics competition field.

In this video we look at the way this robot uses the LEGO Mindstorms EV3 motors. How are they attached and the what the rotation of the motor is transferred to the attachments.

This video discusses the fact the robot requires a few more parts that are available in the LEGO Mindstorms EV3 robotics sets. We have a number of other constructions that require less parts, but for this particular robot construction we have decided to go beyond the standard sets, cheaply buy a few more parts and build a whole box robot with them.

Sometimes robot builders are so overwhelmed with the process of constructing a robot that they forget two very important parts. The brick should be accessible and the cables should not get in the way. These are referred by us as Brick Accessibility and Cable Management.

With the shape of a box it is very easy to align this robot to different wall and to add very stable pinless attachments to it. The goal of the video is to discuss this feature of this particular robot construction.

It's a box! It's a robot! It's a box robot. Box robots are very popular on different robotics competitions involving LEGO Mindstorms like the FIRST LEGO League or World Robotics Olympiad. Let's start with a brief introduction and continue in the next videos with explanation on the features of the robot and why such robots are frequently used.

In the video we improve on the robotics mechanism for pushing the different blocks out of the robot container. We continue from the previous video.

In this video we look at the robotics mechanism for dropping the different blocks into the different region on the World Robotics Olympiad 2013 field.
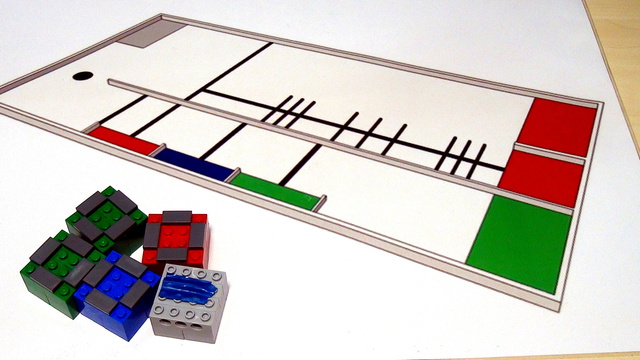
We are working on the World Robotics Olympiad (WRO) 2013 competition and its elementary part. The series will introduce three different concepts and this would be Arrays, Menus and Counting different lines. In the video you will see the robot working as it is in the final stage.
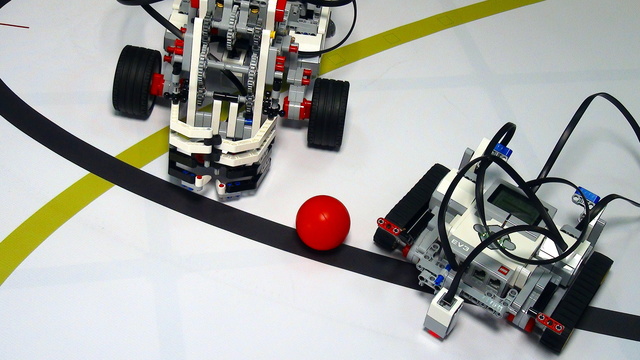
Starting with the World Robotics Olympiad 2014 Junior-High challenge we first catch the object on our path. We discuss a good mechanism for catching and lifting balls that can do two movements with one motor.

Moving in a grid of objects. That's the large challenge of the World Robotics Olympiad 2015 Junior-High 2015. In this video we would build a robot that can collect the boxes (treasures). The robot would also be able to move around the treasures.

This is the final run for our World Robotics Olympiad (WRO) 2015 Elementary Challenge Robot. In "dives", detects the color of the pearl and then counts the number of Ping-Pong balls to release.

Next robot construction for holding and releasing balls from this container. In this video we discuss the improvements and how to use the chains to release one ball at a time.

Improving the construction for the World Robotics Olympiad missions. The improvement is in the position of the sensor and the size of the balls container.

In this last part of the tutorial we actually lift the rocket modules and prepare them for lauch. First we have to collect them in the right order and them somehow lift them.

A robot that contains balls and releases them. It counts how many balls to release depending on the "treasures" it has hunted on the field. This is part of the World Robotics Olympiad 2015 Elementary challenge.
