
Improving FLL Robot Game. Using a rack for Lifting.
The next step of lifting a robot to a mission model is to try to use a rack.
- #448
- 05 May 2017
The next step of lifting a robot to a mission model is to try to use a rack.

Tips and common mistakes when connecting two beams together.

What is allowed and what is not when building without instructions.

Try to add a touch sensor to the robot on your own.

Why we change the robots all the time and what to observe in each new robot.

A special fourth case for a turning with robots with two wheels.

Every turn is a circular motion and we will review the three types of turns from this point of view.

Each palette contains programming blocks that share common purpose. We will cover most of them

How important is it to have predictable behavior in your classes.

How can you be sure your image on the display is seen when the program ends?
We will introduce a convention, an agreement, how and in which cases we are going to use each types of blocks.
How to search for an unknown value with the fewest possible tries.

How to make the robot stay idle while the program is still running.

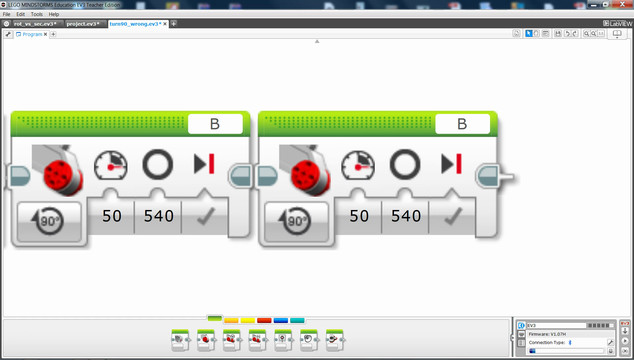
The 90-degree turn of the robot is different from 90-degree turn of the motor!

How to keep the discipline in the classroom and how to cheer up the students.

Why we will never use seconds in our lessons.

Let's learn how to use the Sound block.

This is how to use the display block to show images with the EV3 software.

How to approach that fun relief task.

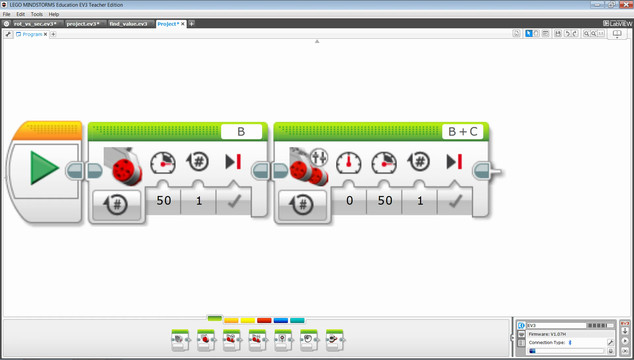
A spin turn is a turn around the center of the robot. Let's learn how to program it.

Think of an attachment that leaves the Gecko on the mission model. Don't use the robot attachment that we already have. Just the box robot and the gecko. Nothing should support the Gecko when it is hanged on the mission model.

Let's cover the break at end option and learn why there is no lesson about it to students.

In this tutorial, we add another mission to our current program. This mission is - hanging the Gecko from the FIRST LEGO League Animal Allies.

We will demonstrate with a robot what the acceleration is and the effects of high and low acceleration.

What should you as a teacher know when the students are trying to achieve a program and robot attachment that could reproduce their behaviour 9 out of 10 times.

We will explain inertia non-scientifically so that we make it easy to understand concept.
