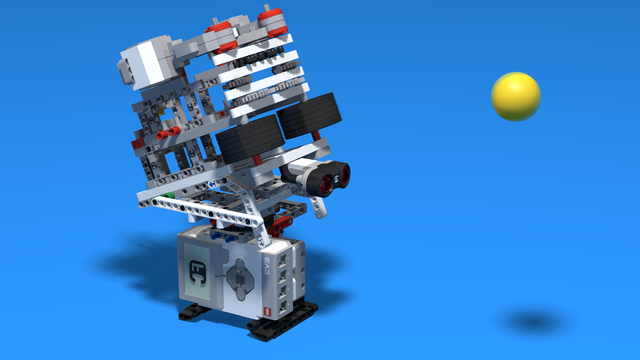
The Roller Coaster - Box Robot from LEGO Mindstorms with XY rack designed for FLL WRO competitions
Here is an idea. What if a robot does not need attachments. What if there is one special attachment on the front that could do most of the work? Probably an attachment that allows you to move a lever in any direction.
This here is a Box Robot with X - Y axys plane. This robot doesn't need active attachments because it has X - Y table that do the job. Imagine that there is a plane on the front of the robot. With the rack mechanism you can move to any coordinates on this plane.
We have a lot of ideas how to make it even better. We will try to release them in the next few versions.
- #865
- 02 Oct 2019