Time to lift the robot. The first approach is by using the 40 teeth gear wheels that come with the LEGO Mindstorms EV3 and NXT robotics sets.
- #444
- 06 Mar 2017
- 2:44
- LEGO MINDSTORMS, LEGO MINDSTORMS EV3
- Lift, FIRST LEGO League, FIRST LEGO League 2016-2017 Animal Alias, Gears, EV3, FLL 2016, Construction, FLL, Classes with students
Building legs with the gears
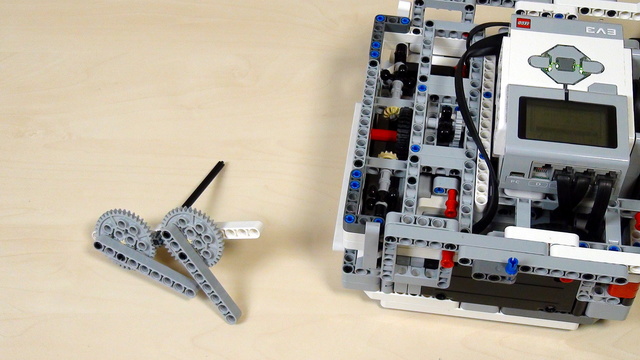
Place two of the wheels on each side of the robot. Attach the wheels to each other with a beam. Having two of this mechanism on both sides of the robot could result in the robot being lifted. This is exactly the movement that we need to lift and hang the robot on the mission model.
English
After you can fix the robot on the mission model or on the box or whatever you are building for fixing it it is time to look at different ways to lift it. And the first thing that I would like to show you is using the 40 teeth gear wheels.
The idea is pretty simple. On the two sides of the robot the left side and the right side and these are left and right from my point of view we'll build legs. And these legs will use a system of gear wheels. And we have gear wheels with different sizes and different number of teeth. And we also have a few gear wheels that have 40 teeth. We can use them. We can build a system where we place two of these wheels on a beam and a small wheel in-between. And then we can control two of the wheels. We can also attach a beam to the wheels because it has holes. And when we do this the next step is to align the two legs, fix them with the small gear something like this and add them at the side of the robot. Let's say the left side. Then when we rotate the axle from the motor what will happen is that we would lift the robot. You see. It is exactly the movement that we need for moving the robot forward hanging on the mission model. We just rotate like this and it will lift the robot. Of course, we can change the length of these beams. We can also add another beam right here to make it more stable. But the general principle is the idea of the mechanism. And this might work in some of the cases. What you should do now is to try to do it for your robot. How would this look like if you have these 40 teeth gear wheels at the side of the robot two on the left side, two on the right side? Somehow transfer the power and try to lift.
Courses and lessons with this Tutorial
This Tutorial is used in the following courses and lessons

FIRST LEGO League (FLL) 2016-2017 Animal Allies. Review of solutions with explanations
The course contains a number of sections with specific examples and tasks on how you could improve your FIRST LEGO League (FLL) robot game in order to achieve more points. It is designed mostly for after season teams that would like to prepare for next year, but could also work for teams that are currently working on their competition robots.
- 48
- 118:45
- 15
LARGE 40 teeths gear wheels for Lifting
Time to lift the robot. The first approach is by using the 40 teeth gear wheels that come with the LEGO Mindstorms EV3 and NXT robotics sets.
- 4
- 0
- 1
- 3d_rotation 0