
WRO Junior-High 2015. Collecting single treasure. Full run. Part 5
In this episode we do a full run of the mission for collecting a single treasure before going into explanation on how we have programmed the robot.
- #228
- 16 Oct 2016
In this episode we do a full run of the mission for collecting a single treasure before going into explanation on how we have programmed the robot.

Collect the humans and clear them from the rocket launching region. This is rather straightforward as a task, but it requires a little bit of thinking if you want to do it without manipulators.


In this tutorial, we would implement a program that finds the minimum and maximum value detected by the sensor and stores this two values in an array.

In this tutorial we will use Whakatae - LEGO Education SPIKE Prime Box robot to complete a mission run from the FIRST LEGO League 2019-2020 competition for the M08 Elevator mission. We accomplish 10 out of 10 in this mission. A similar approach is demonstrated with LEGO Mindstorms EV3 at FLL 2019: Accomplish every time. M08 Elevator. 10 out of 10 successful runs

Implementing the next logic for aligning to the border when we approach the border from the right.

Motors can be placed in opposite directions... opposite .. directions. Robo-builders might have difficulties imagining it so we have build one. One of the motors facing forward, the other backward. It is interesting how this robot turns.

In this episode we will show you how to build the FiveMinuteBot. We will make a quick overview of this Mindstorm Robot.

Improving the construction for the World Robotics Olympiad missions. The improvement is in the position of the sensor and the size of the balls container.

Don't limit yourself to the box and think of different ways to lift the robot.
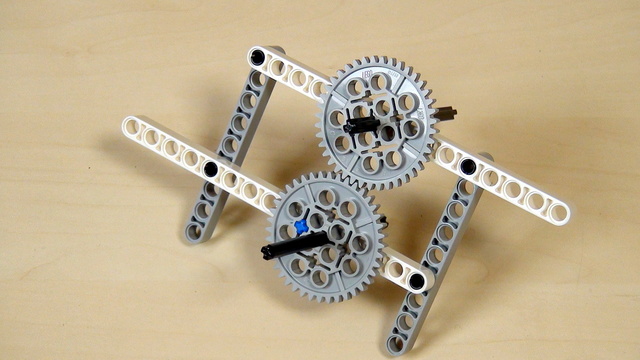
Time to lift the robot. The first approach is by using the 40 teeth gear wheels that come with the LEGO Mindstorms EV3 and NXT robotics sets.

How should an instructor use this course when working with students and a group of students in school

Previously we caught the Truck with two rubber bands. The next step was to lift it. For lifting we used the Medium LEGO Mindstorms EV3 motors. In this video we are extending the attachment so that we could catch also the Ambulance. In forth video we would explore how to release both vehicles after transporting them.

In this second part we continue with the next few tasks from the FIRST LEGO League (FLL) 2013 competition. Using the same rubber band attachment we lift the house and collect a few of the humans and cargoes.

Where should you lift the robot? Especially if you don`t have the mission model that we are using

The final video from the course. The robot escapes the state where it is lost. This happens if it can not continue in any direction.

Build a robot base to use in the course. You can use the robot base provided by us or you can build one yourself.

Based on your feedback we have decided to show you the live process of building a complex LEGO Mindstorms EV3 Competition robot without having the whole robot ready yet. We are continuing from part 2 where we finished the 'front' of the robot and now we will extend it so that we could also attach the rear part.

Note for the teacher on how to organize the class to use different robot base constructions to accomplish the mission for lifting.

As an extension to the previous video we talk about the Hi Technic Color Sensor again.

Many times we just upload blocks and leave it up to you to use it. In this tutorial, I would like to show you how to use the implemented blocks. How to import them into the EV3-G software. How to see them in the palette. How to drag and drop them to build a working program.

Build a similar mechanism to this one. Similar, but for your robot. This is the task for you. Try, give yourself half and hour or even an hour.

This third way of positioning the LEGO Mindstorms EV3 motors on the robot seems to be the most productive with the most advantages. We have named it "correct", but we completely understand there might be other even more efficient ways to position the motors on the robot.

Do it yourself, fix the errors in the construction of the EasyBot

The challenge for this video is to program a menu that is controlled from the LEGO Mindstorms EV3 brick screen.
One of the very common problems with the LEGO Mindstorms and LEGO Technic Gear wheels is then a tooth is skipped. In this video, I would like us to discuss this challenge and how do we solve it.

We will cover the names and the basic usage of the parts in our typical robot.
