
Improving FLL Robot Game. Using a rack for Lifting.
The next step of lifting a robot to a mission model is to try to use a rack.
- #448
- 05 May 2017
Every teacher/instructor can conduct classes with students using these resources. You need to motivate and organize the students. We provide the technical theory, tasks, instructions, programs and everything needed.
The next step of lifting a robot to a mission model is to try to use a rack.

We've already build a number of resources for lifting at FLLCasts.com. But at the end of this course we would have a robot that lifts itself and hangs on the mission model.

The final way for lifting our box robot is by using a scissors mechanism. In this Episode, we would discuss the benefits and advantages of this mechanism.

In this tutorial, we would drive the scissors mechanism and there are a number of rules that we must follow

Don't limit yourself to the box and think of different ways to lift the robot.
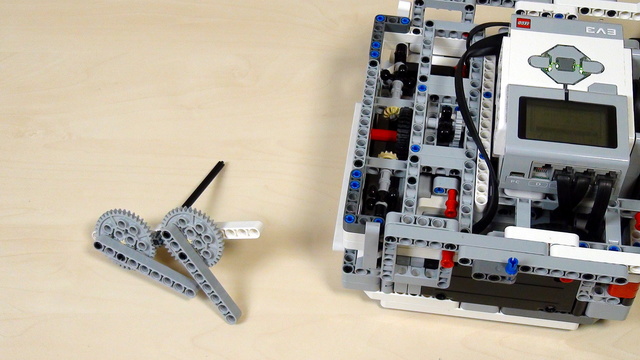
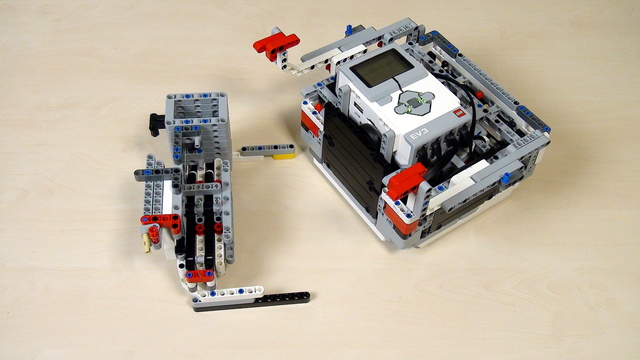
Time to lift the robot. The first approach is by using the 40 teeth gear wheels that come with the LEGO Mindstorms EV3 and NXT robotics sets.

How should an instructor use this course when working with students and a group of students in school

Where should you lift the robot? Especially if you don`t have the mission model that we are using

Note for the teacher on how to organize the class to use different robot base constructions to accomplish the mission for lifting.
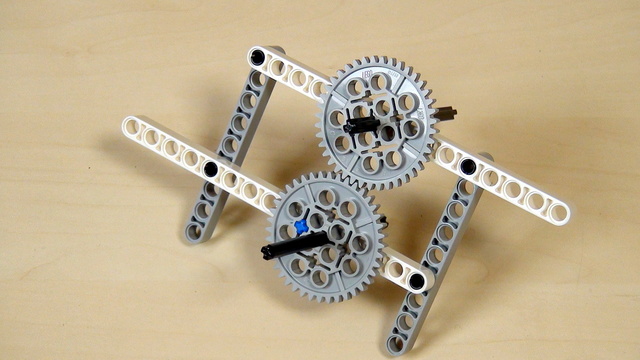
One of the very common problems with the LEGO Mindstorms and LEGO Technic Gear wheels is then a tooth is skipped. In this video, I would like us to discuss this challenge and how do we solve it.

How to organize the different robots and group of students when working on lifting the robot.

Remember the passive/active attachment separation that we are making at FLLCasts.com. This applies for all the attachments and in this Episode, we are looking at how to use a passive attachment.

Using the rack depends on the experience of the team. Based on this a different number of gear wheels and racks would be used.

How great is the great attachment for lifting that we built in this course? How many times can it lift the robot without making an error? How great are your attachments and how could you test them? - the answer is simple. Just try 10 times and they should work at least 9 of them as our attachment is.

It this episode we would present you with our attachment for lifting the robot.

Here is our solution for preventing torsion and bending of the LEGO Mindstorms EV3 axles.

Before moving forward here is the simple task of building the mechanism and extending the legs. Extend the legs to fifteen LEGO units.

How to align the wheels and how much should you push for this solution?

There were a few problems with the 40 teeth gears that we were using. Let's list some of them

Building a rack is a very important skill during competitions. You should try to build one, learn how to use it and have it as a tool for you next robots. But for this particular BoxRobot, we will not continue with a rack.

The most stressed wheel in our system is the driven wheel. We've already fixed the problem with the driving wheel of the scissor mechanism and now it is time to look at the drive LEGO Mindstorms wheel.

Think of an attachment that leaves the Gecko on the mission model. Don't use the robot attachment that we already have. Just the box robot and the gecko. Nothing should support the Gecko when it is hanged on the mission model.

In this tutorial, we add another mission to our current program. This mission is - hanging the Gecko from the FIRST LEGO League Animal Allies.

We calculate the number of rotatios when a gear system is involved. The driving wheel will have to do a number of rotations for the driven wheel to rotate to a desired number of degrees. In our specific case when the driven gear wheel is rotate to about 90 degrees the legs will lift the robot.

Construct two legs for both sides of the robot. The task for this video is to attach this two legs on both sides and to build a system of gears and axles that power those legs.

This is a teacher's note about the math behind calculating gear ratios with for our lifting attachment. It math model we build in previous tutorials is not exactly correct and here is the explanation why.
